
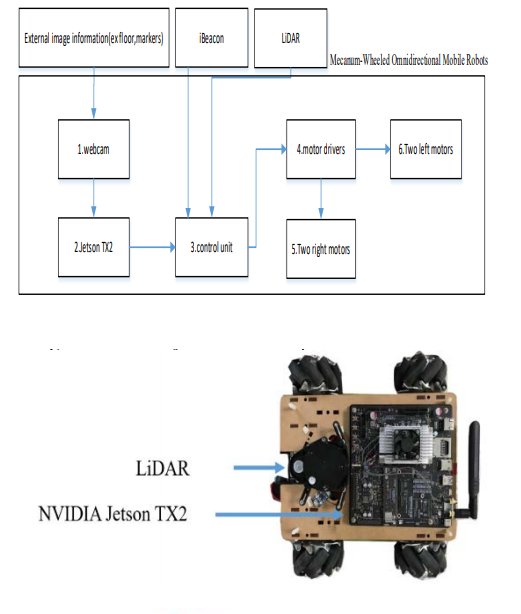
Beacons are great for use with robots for use in determining extra contextual information. There’s recent research on Autonomous Navigation of an Indoor Mecanum-Wheeled Omnidirectional Robot Using Segnet (pdf) that uses iBeacons to determine a rough location of the robot.
The locating uses Kalman filtering and trilateration to get a fix for the robot.
If you want to learn more about using RSSI to determine robot location there’s also a presentation video Robot Localization using Bluetooth Low Energy Beacons RSSI Measures by David Obregón Castellanos.
Read about Using Beacons, iBeacons for Real-time Locating Systems (RTLS)