We have the new INGICS iGS01S Bluetooth WiFi gateway in stock.
iGS01S with USB power cable
The iGS01S is a new version of the iGS01. It’s functionally compatible with the iGS01 in that you can replace an iGS01 with an iGS01S and it will behave similarly. Hence, it’s also compatible with BeaconServer™ and BeaconRTLS™.
iGS01 gateways allow you to scan for nearby Bluetooth devices and send the scanned data up to a server, including AWS IoT, via TCP, HTTP(S) POST or MQTT.
The main change is the case which the manufacturer has changed to allow commonality of parts with the Ethernet version, the iGS01E.
Nordic have news of a new cycling helmet with embedded nRF52 device, also used inside many beacons, that detects acceleration and in conjunction with an app, can send location and crash alerts.
While it’s an interesting and innovative product, most of the work is done by the app. There’s no reason why a generic acceleration sensor beacon couldn’t have been used within the helmet (or elsewhere). However, we guess including anything extra inside a helmet, in a safe manner, poses some challenges.
An insight from this is that there are probably many untapped opportunities for vertical sensor beacon type applications that predominantly make use of apps to provide for much of the functionality.
While there’s lots of technology used in much of our lives, most buildings currently don’t use much technology. The current low level of sophistication is such that people tend to suffer uncomfortable buildings with common complaints rooms are “too hot” or “too cold”. There are clearly opportunities for significant improvement, not just for occupants but also for companies occupying buildings, the building owners and solution vendors.
Last year, the Continental Automated Buildings Association (CABA), a leading international industry organisation with 380+ corporate members created a free white paper ‘Creating a New Deal for Buildings’ (pdf).
The paper explains how building automation systems (BAS) and IoT devices can be used to improve the value and utility of facilities. Solutions also provide ways to use less energy and ensure regulatory compliance.
The cost of automation systems isn’t large compared to building costs. The CABA are advocating the design of BAS, during the design phase, much earlier in the building process. The paper talks of the incentives and challenges. Open standards, ubiquitous connectivity and automatic discovery of devices are seen as aiding uptake. The paper goes on to clearly describe the benefits for owners, tenants and vendors. It also covers issues such as privacy, data ownership and sustainability.
The paper says:
“The introduction of LED lighting and the digitalization of lighting control systems add additional optimization dimensions to the interoperability potential of the BAS”
The first wave of Bluetooth Mesh devices have been connected lighting solutions. Bluetooth connected lighting paves the way for further innovations, on top, such as sensor networks for automation and control, asset management solutions and navigation solutions.
Bluetooth is is particularly suitable for smart buildings due to:
Compatibility and inter-operability. Vendors products work together and systems can be accessed via ubiquitous smartphones.
Low power. Independent devices can run for years on battery power.
Low cost. Standards based devices lower components and hence costs.
View the Bluetooth video on ‘The Expanding Role of Bluetooth in Smart Buildings’:
The paper explains how the Bluetooth Mesh Standard came about to address the problem of the variety of BLE meshing solutions that were not interoperable. It includes a great introduction to Bluetooth LE and Mesh with some statistical and experimental insights into mesh performance.
The authors explain how the choice of the use of advertising advertising at 100% duty cycle for lower end-to-end delay has degraded the low energy advantage of BLE advertising thus limiting the usefulness in power (battery) sensitive applications.
The paper contains some useful insights:
The back off mechanism, used to decrease the chance of mesh network collisions, contributes most to the communication delay. However, as they identify, it’s this mechanism that provides reliability and scalability in larger networks. Disabling the backoff mechanism decreases the delay but makes the network less scaleable and robust.
Making the network more dense, has a positive effect on the round trip time (RTT). However too a dense network leads to more collisions.
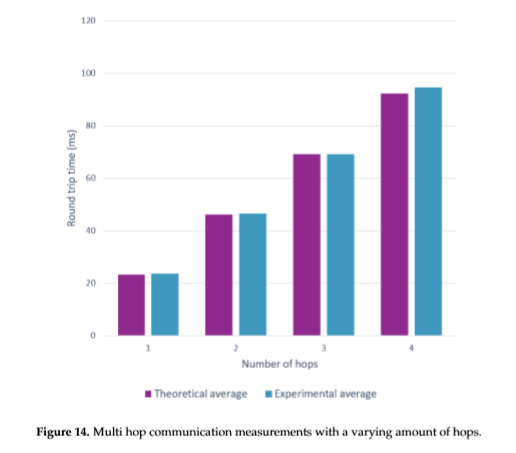
Increasing the number of hops needed, making the network more sparse, has a negative effect on the RTT.
“It is clear that there are a lot of factors influencing the communication flows within a Bluetooth Mesh network, requiring more advanced management mechanism for optimizing the performance of the mesh network.”
However, the research had some limitations. Noise was simulated by introducing non-mesh beacons advertising every 20ms. This wasn’t very realistic given that most beacons advertise in the range 100ms to 1000ms. Re-transmit time was considered that complicated calculations – especially as re-transmit is application specific. It wasn’t mentioned that in many mesh sensing applications, unacknowledged messages are acceptable such that there’s no re-transmit. Also, the affect of other mesh network traffic, on the round trip time, wasn’t considered – only one mesh transmission at a time was considered.
The iB003N-PA has a range up to 300m because it uses the RFAXIS X2401C 2.4GHz amplifier to increase the range.
iB003N-PA
When you use the manufacturer app to change the power output by a beacon, you are changing the power output by the Nordic nRF51 System on a Chip (SoC) that is usually fed to the antenna. In the case of the iB003N-PA, the RFAXIS X2401C instead receives the signal, amplifies it and sends it to the antenna. The resultant change in output is:
SoC Setting
X2401C Output
0dbm
20dBm
4dbm
20dBm
-5dbm
15dBm
-10dbm
10dBm
20dBm is the maximum allowable output for class 1 Bluetooth. There’s no difference whether you set to 0dBm or 4dBm, the output will be 20dBm. Even at a low power setting, -10dbm, the amplified output is 10dBm which is relatively high compared to the nominal 0dBm for most beacons. That’s just over 3x the power (3dBm change is a doubling of power) of a normal beacon. You can see that this beacon is primarily designed for long distance and there’s no need to change the SoC power from the default 0dBm = 20dBm.
Connected factory implementations require a large number of connected assets for condition-based monitoring, asset tracking, inventory (stock) management or for building automation. Bluetooth is a secure, low cost, low power and reliable solution suitable for use in connected factories. In this post, we examine the reasoning behind some out-of-date thinking on industrial wireless, uncover the real problems in factories and provide some explanations how Bluetooth overcomes these challenges.
Operations teams are usually very sceptical about industrial wireless. They have usually tried proprietary industry solutions using wireless with mixed results. They might have experienced how connections, such as WiFi, can become unreliable in the more electrically noisy areas of factories. The usual approach is to use cable. However, this can become expensive and time consuming. Using cable isn’t possible when assets are moving and becomes impractical when the number of connected items becomes large as in the case of connected factories. As we shall explain, Bluetooth is intrinsically more reliable than WiFi even through they share the same 2.4GHz frequency band.
There’s usually lots of electrical noise in an industrial environment that tends to be one of two types:
Electromagnetic radiation emitted by equipment. This typically includes engines, charging devices, frequency converters, power converters and welding. It also includes transmissions from other radio equipment such as DECT phones and mobile telephones.
Multipath propagation which is reflection of radio signals off, usually metallic, surfaces and received again slightly later.
It’s important to understand how Bluetooth and other competing technologies react to these types of interference. There’s a useful study (pdf) by Linköping University, Swedish Defence Research Agency (FOI) and the University of Gävle on noise industrial environments.
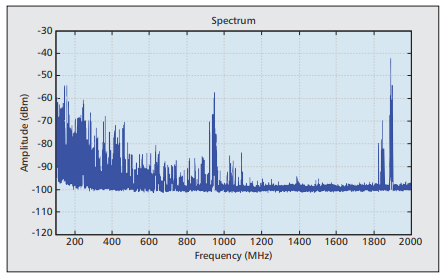
Noise in industrial environments tends to follow the following spectral pattern:
Electrical noise spectrum
There’s usually lots of electrical noise up to about 500MHz. This means wireless communication using lower frequencies, such as two way radio, exhibits a lot of noise. Pertinently, several wireless solutions for industrial applications use frequencies in the 30–80 MHz and 400–450 MHz bands. Bluetooth’s and WiFi’s 2.4GHz frequency is well above 500MHz so exhibits better reliability than some industrial wireless solutions. Incidentally, in the above charts, the peaks around 900 MHz and 1800 MHz mobile phone signals and 1880–1890 MHz come from DECT phones.
The magnitude of multipath propoagation depends on the environment. It’s greatest in buildings having highly reflective, usually metallic, floors, walls and roofs. If you imagine a radio signal wave being received and then received again nanoseconds later, you can imagine how both the amplitude (peaks) and the phase of the received signal becomes distorted over time. Bluetooth uses Adaptive Frequency Hopping (AFH) which means that packets transferred consecutively in time do not use the same frequency. Thus each packet acts like a single narrowband transmission and there’s less affect of one packet on the next one. However, what is more affected is amplitude which manifests itself as the received overall signal strength (RSSI). RSSI is often used by Bluetooth applications to infer distance from sender to receiver. We will mention mitigations for varying RSSI later.
It’s important to consider what happens when there is electrical noise. It turns out that technologies invented to ensure reliable transmission behave much less well in noisy situations. One such technique is carrier sense multiple access (CSMA), used by WLAN (WiFi), that listens to the channel before transmitting and waits until a free channel is observed. CSMA and automatic auto repeat (ARQ) also have re-transmission mechanisms. The retrying can also incur significant extra traffic that can overwhelm the communication in noisy environment. Bluetooth doesn’t use such schemes.
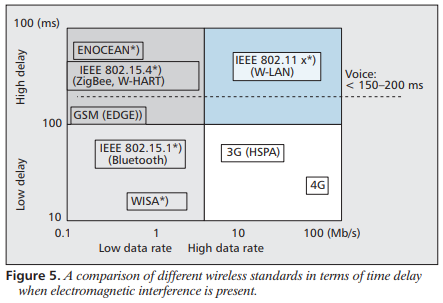
The previously mentioned research classifies different wireless technologies according to the delay when used in noisy environments:
Bluetooth (and WISA) is a good choice for noisier environments. It’s particularly suited for applications with lower data rates and sending at periodic intervals.
A final consideration is interference between Bluetooth and other technologies, such as WiFi, that use similar 2.4GHz frequencies. As mentioned in a previous post, there’s negligible overlap between Bluetooth and WiFi channel frequencies.
In summary, Bluetooth is more suited to electrically noisy environments and also offers low cost, low power and secure wireless communication.
These conclusions correlate well with our own empirical observations. We have found that Bluetooth advertising is still received in environments we have measured, using a RF spectrum analyser, to be electrically noisy around 2.4GHz . We believe this is because Bluetooth advertising hops across three frequencies such that there’s less likelihood of noise on all three. Advertising is also very short, typically taking 1 or 2 ms, making the coincidence of the noise and the advertising less likely than would be the case of a longer transmission.
It has been our experience that solutions using Bluetooth advertising are more reliable than those using Bluetooth (GATT) connections, especially in noisy environments when it’s difficult to maintain the chatty protocol of a connection over a long time period. In noisy situations, advertising is usually seen on a future transmit/scan if the first advertising is lost. By coincidence or design, Bluetooth Mesh is built on communication via advertising rather than connection and for this reason is also reliable on the factory floor.
However, using Bluetooth isn’t a silver bullet. There are situations where factories, or more usually parts of factories, have reflective surfaces or unusual radio frequency (RF) characteristics stretching into unforeseen frequencies. Poorer performing WiFi also needs to be considered in context of choosing between Ethernet and WiFi gateways and Bluetooth mesh.
It’s important to do a site survey including RF spectral analysis. This will uncover nuances of particular critical locations or coverage that can drive subsequent hardware planning. It can also feed into requirements for software processing, for example particular settings for processing within a real time locating system (RTLS) to cater for more varying RSSI.
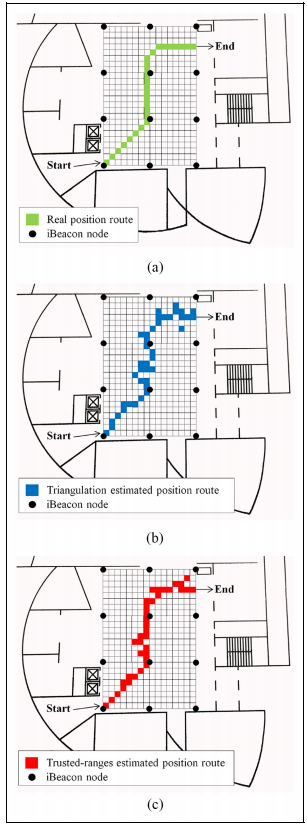
A mentioned in our post on location accuracy, two methods of improving accuracy are calibration and trilateration. There’s a recent research paper on iBeacon indoor localization using trusted-ranges model, that explores an alternative ‘trusted-ranges’ method. The method is still based on the RSSI measurements between the beacon and detector. It builds up a trusted-range model to describe how the RSSI varies over time and distance.
The model supplies reliable ranges of received signal strength values from nearest neighbours classifying received signal strength values into various levels of range. It performs better than calibration, especially at shorter ranges, while having a low complexity and hence computationally fast speed.
There’s a new GitHub Swift source code project, cbeacon, that implements a command line program that transmits iBeacon advertisements. It works on macOS 10.12 or greater.
The author is also the author of another application, BeaconFinder, written in objective-c, that provides GUI tool for detecting iBeacons:
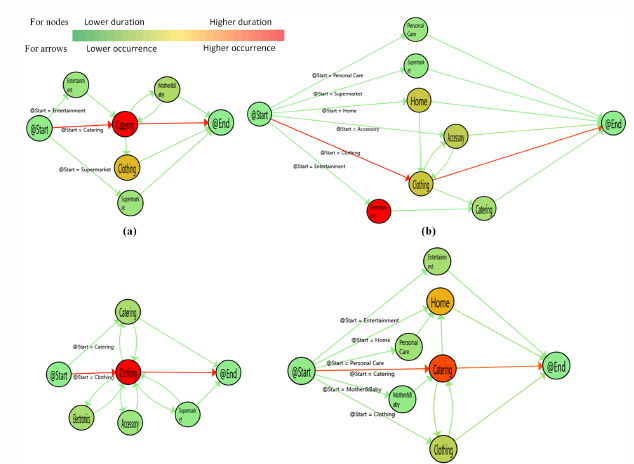
The authors use a ‘process mining’ algorithm to look at infrequent and incomplete data from a beacon event log. They analysed 642 customer paths of which 165 were male and 477 female. These were beacons people voluntarily carried as part of the study, not Bluetooth from their smartphones.
Customer journeys
The aim was to determine popular store groups, duration of visits and customer behaviour. They learnt that male customers had a loop between clothing-catering and clothing-supermarket. Female customers had a clothing-catering loop. Customers who spent more time in catering spent less time in clothing and vice versa. Male customers visited fewer store groups and visited stores in an unplanned way. Catering and clothing were the most popular store groups depending on the time (of year)
The paper concludes that Bluetooth is a cost-effective tracking technology that provides unbiased and uninfluenced observations.
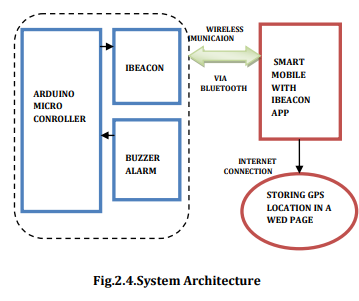
There’s an interesting recent article from the International Research Journal of Engineering and Technology (IRJET) on Smart Workplace – Using iBeacon (pdf).
The article explains how iBeacon can be used to log the entry and exit of people and describes GPS activated by iBeacon.