There’s a new paper by Seyed Mahdi Darroudi, Raül Caldera-Sànchez and Carles Gomez of Department of Network Engineering, Universitat Politècnica de Catalunya/Fundació, Spain on Bluetooth Mesh Energy Consumption: A Model.
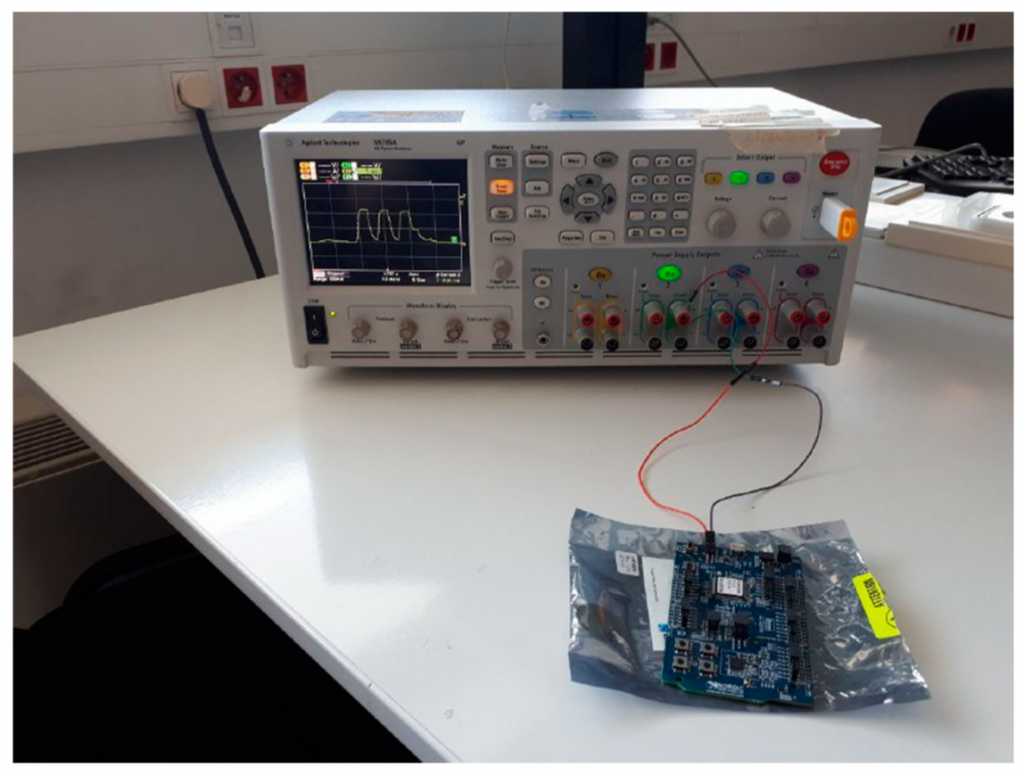
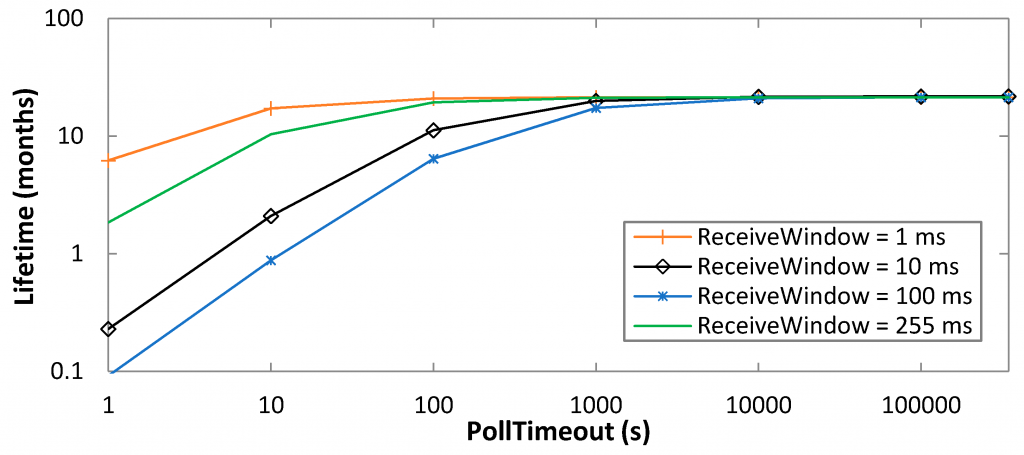
They set up some experiments to measure current consumption under various parameters:
They found that a sensor device running on a simple 235 mAh battery, sending a data message every 10 secs, can achieve a lifetime of up to 15.6 months.
We have a new short video (4 mins 43 secs) showing the BeaconRTLS™ user interface and demonstrating the REST interface that can be used by external systems (best viewed fullscreen):
Aside from the unique aspect of mixing asset tracking and IoT sensing, you can see that BeaconRTLS™ has an unusually good UI compared to most enterprise software. Software used for business tends to be clunky with screen updates requiring full page refreshes. BeaconRTLS™ uses Material Design and uses latest asynchronous techniques such that everything is rendered in the web browser as opposed to at the server which makes screen updates smooth and flicker free. More importantly, relieving the server of rendering, continuously changing, ‘live view’ web pages frees up computing resources that are better used for processing incoming beacon advertising.
The Singapore Space and Technology Association has partnered with Airbus to launch a HADR (Humanitarian Assistance and Disaster Relief) challenge. The objectives are to use latest technologies to aid rescue efforts.
Lee Wei Wen and Lee Wei Juin propose the use of iBeacon to display the GNSS locations of the rescuers with live updates of the rescue plan across different agencies:
Beacons have been used for years now to trigger offers and information in-store. The beacon marketing ecosystem changed abruptly last November when Google abandoned Nearby smartphone notifications such that all notifications now need an app.
Fujitsu is promoting the merits of having a mall-wide rather than store specific apps. A so called ‘Smart Mall’ can still drive in-store sales through smartphone notifications while at the same time provide increased added value such as mall plans, wayfinding, product comparison and price comparison.
In some ways, getting visitors to download a mall app might be less of a hard sell than downloading an app for each store. This particularly benefits the smaller stores whose apps would never get downloaded.
The data flow can be two way. Shopper movements can be tracked across stores revealing common patterns to aid improvements to flow and identification of dead areas. Sensors can be used to locate and determine the state of equipment, for example letting maintenance staff know when supplies need replenishing. There are also usecases in security preparedness for shoppers, stores and mall security staff.
Haltian has a useful IoT protocols comparison. It provides a comparison of TE Cat 1, LTE Cat M1, EC-GSM-IoT, NB-Io, Zigbee, SigFox, LoRa, Google Thread, Bluetooth LE and Wirepas Mesh.
Haltian say “It’s is a question of selecting the best-suited option for each use-case at hand”. One thing they don’t say is that the protocols are not mutually exclusive. For example, it’s increasingly the case that more than one protocol is used, one for short on-site distances and another for intra-site communication. WiFi/Ethernet also aren’t mentioned which are often a component of IoT solutions.
We have the new INGICS iGS01S Bluetooth WiFi gateway in stock.
iGS01S with USB power cable
The iGS01S is a new version of the iGS01. It’s functionally compatible with the iGS01 in that you can replace an iGS01 with an iGS01S and it will behave similarly. Hence, it’s also compatible with BeaconServer™ and BeaconRTLS™.
iGS01 gateways allow you to scan for nearby Bluetooth devices and send the scanned data up to a server, including AWS IoT, via TCP, HTTP(S) POST or MQTT.
The main change is the case which the manufacturer has changed to allow commonality of parts with the Ethernet version, the iGS01E.
The paper explains how the Bluetooth Mesh Standard came about to address the problem of the variety of BLE meshing solutions that were not interoperable. It includes a great introduction to Bluetooth LE and Mesh with some statistical and experimental insights into mesh performance.
The authors explain how the choice of the use of advertising advertising at 100% duty cycle for lower end-to-end delay has degraded the low energy advantage of BLE advertising thus limiting the usefulness in power (battery) sensitive applications.
The paper contains some useful insights:
The back off mechanism, used to decrease the chance of mesh network collisions, contributes most to the communication delay. However, as they identify, it’s this mechanism that provides reliability and scalability in larger networks. Disabling the backoff mechanism decreases the delay but makes the network less scaleable and robust.
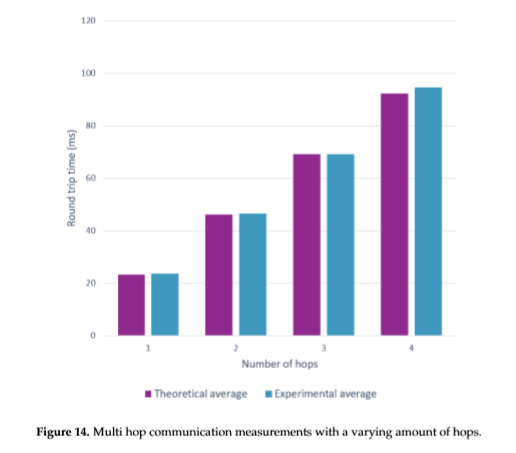
Making the network more dense, has a positive effect on the round trip time (RTT). However too a dense network leads to more collisions.
Increasing the number of hops needed, making the network more sparse, has a negative effect on the RTT.
“It is clear that there are a lot of factors influencing the communication flows within a Bluetooth Mesh network, requiring more advanced management mechanism for optimizing the performance of the mesh network.”
However, the research had some limitations. Noise was simulated by introducing non-mesh beacons advertising every 20ms. This wasn’t very realistic given that most beacons advertise in the range 100ms to 1000ms. Re-transmit time was considered that complicated calculations – especially as re-transmit is application specific. It wasn’t mentioned that in many mesh sensing applications, unacknowledged messages are acceptable such that there’s no re-transmit. Also, the affect of other mesh network traffic, on the round trip time, wasn’t considered – only one mesh transmission at a time was considered.
Connected factory implementations require a large number of connected assets for condition-based monitoring, asset tracking, inventory (stock) management or for building automation. Bluetooth is a secure, low cost, low power and reliable solution suitable for use in connected factories. In this post, we examine the reasoning behind some out-of-date thinking on industrial wireless, uncover the real problems in factories and provide some explanations how Bluetooth overcomes these challenges.
Operations teams are usually very sceptical about industrial wireless. They have usually tried proprietary industry solutions using wireless with mixed results. They might have experienced how connections, such as WiFi, can become unreliable in the more electrically noisy areas of factories. The usual approach is to use cable. However, this can become expensive and time consuming. Using cable isn’t possible when assets are moving and becomes impractical when the number of connected items becomes large as in the case of connected factories. As we shall explain, Bluetooth is intrinsically more reliable than WiFi even through they share the same 2.4GHz frequency band.
There’s usually lots of electrical noise in an industrial environment that tends to be one of two types:
Electromagnetic radiation emitted by equipment. This typically includes engines, charging devices, frequency converters, power converters and welding. It also includes transmissions from other radio equipment such as DECT phones and mobile telephones.
Multipath propagation which is reflection of radio signals off, usually metallic, surfaces and received again slightly later.
It’s important to understand how Bluetooth and other competing technologies react to these types of interference. There’s a useful study (pdf) by Linköping University, Swedish Defence Research Agency (FOI) and the University of Gävle on noise industrial environments.
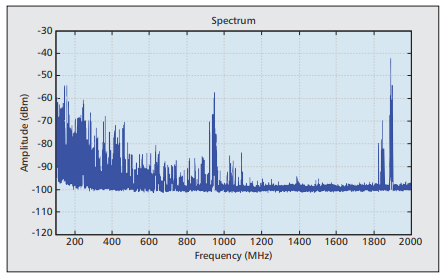
Noise in industrial environments tends to follow the following spectral pattern:
Electrical noise spectrum
There’s usually lots of electrical noise up to about 500MHz. This means wireless communication using lower frequencies, such as two way radio, exhibits a lot of noise. Pertinently, several wireless solutions for industrial applications use frequencies in the 30–80 MHz and 400–450 MHz bands. Bluetooth’s and WiFi’s 2.4GHz frequency is well above 500MHz so exhibits better reliability than some industrial wireless solutions. Incidentally, in the above charts, the peaks around 900 MHz and 1800 MHz mobile phone signals and 1880–1890 MHz come from DECT phones.
The magnitude of multipath propoagation depends on the environment. It’s greatest in buildings having highly reflective, usually metallic, floors, walls and roofs. If you imagine a radio signal wave being received and then received again nanoseconds later, you can imagine how both the amplitude (peaks) and the phase of the received signal becomes distorted over time. Bluetooth uses Adaptive Frequency Hopping (AFH) which means that packets transferred consecutively in time do not use the same frequency. Thus each packet acts like a single narrowband transmission and there’s less affect of one packet on the next one. However, what is more affected is amplitude which manifests itself as the received overall signal strength (RSSI). RSSI is often used by Bluetooth applications to infer distance from sender to receiver. We will mention mitigations for varying RSSI later.
It’s important to consider what happens when there is electrical noise. It turns out that technologies invented to ensure reliable transmission behave much less well in noisy situations. One such technique is carrier sense multiple access (CSMA), used by WLAN (WiFi), that listens to the channel before transmitting and waits until a free channel is observed. CSMA and automatic auto repeat (ARQ) also have re-transmission mechanisms. The retrying can also incur significant extra traffic that can overwhelm the communication in noisy environment. Bluetooth doesn’t use such schemes.
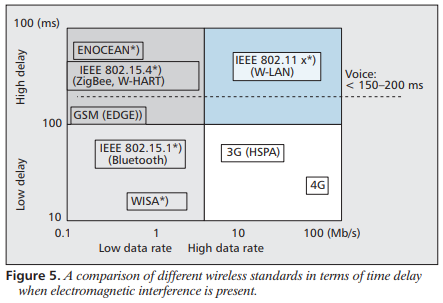
The previously mentioned research classifies different wireless technologies according to the delay when used in noisy environments:
Bluetooth (and WISA) is a good choice for noisier environments. It’s particularly suited for applications with lower data rates and sending at periodic intervals.
A final consideration is interference between Bluetooth and other technologies, such as WiFi, that use similar 2.4GHz frequencies. As mentioned in a previous post, there’s negligible overlap between Bluetooth and WiFi channel frequencies.
In summary, Bluetooth is more suited to electrically noisy environments and also offers low cost, low power and secure wireless communication.
These conclusions correlate well with our own empirical observations. We have found that Bluetooth advertising is still received in environments we have measured, using a RF spectrum analyser, to be electrically noisy around 2.4GHz . We believe this is because Bluetooth advertising hops across three frequencies such that there’s less likelihood of noise on all three. Advertising is also very short, typically taking 1 or 2 ms, making the coincidence of the noise and the advertising less likely than would be the case of a longer transmission.
It has been our experience that solutions using Bluetooth advertising are more reliable than those using Bluetooth (GATT) connections, especially in noisy environments when it’s difficult to maintain the chatty protocol of a connection over a long time period. In noisy situations, advertising is usually seen on a future transmit/scan if the first advertising is lost. By coincidence or design, Bluetooth Mesh is built on communication via advertising rather than connection and for this reason is also reliable on the factory floor.
However, using Bluetooth isn’t a silver bullet. There are situations where factories, or more usually parts of factories, have reflective surfaces or unusual radio frequency (RF) characteristics stretching into unforeseen frequencies. Poorer performing WiFi also needs to be considered in context of choosing between Ethernet and WiFi gateways and Bluetooth mesh.
It’s important to do a site survey including RF spectral analysis. This will uncover nuances of particular critical locations or coverage that can drive subsequent hardware planning. It can also feed into requirements for software processing, for example particular settings for processing within a real time locating system (RTLS) to cater for more varying RSSI.
The traditional way of tracking assets using barcodes, NFC or RFID requires that someone of something scan the items at very close range. Bluetooth has the advantage that it works up to 70m, sometimes up to 300m allowing the reading to be done:
Without moving the items, saving infrastructure such as conveyor belts
Without human involvement, saving time
Continuously
The affect of ‘continuously’ is subtle but powerful. With traditional scanning, information as to the whereabouts of an item is only as good as the last scan that could be minutes, hours or even days ago. If the item moves without scanning, finding it can be very difficult. Bluetooth asset tracking is updated continuously.
Although beacons cost more than barcodes, NFC and RFID, the readers, usually gateways, cost considerably (x10) less. As the beacons are Bluetooth, for some scenarios the readers are ‘free’ as you can use smartphones already in use. Nevertheless, beacons cost ($5 to $40) more than barcodes so tend to be used on aggregated items such as pallets and sub-assemblies or on single valuable items.
Beacons go beyond simple simple assets tracking into the Internet of Things (IoT). The same beacons can monitor quantities such as vibration, temperature, humidity, light, proximity, smoke and gas. Using beacons for extra purposes such as sensing and providing triggered information about assets can often be the most compelling aspect of using beacons.
When it comes to software, think carefully. Most people expect functionality similar to traditional barcode-based asset tracking with software on a server somewhere. While the equivalent exists in the form of RTLS systems that put beacons onto maps and plans, it’s sometimes possible to implement a simpler solution to get the job done. Could your requirements be met with just an app? One such example is the work we did for Malvern instruments that’s a simple app that does a stock check by scanning for beacons as the user moves about their site. Also, we have found that many organisations don’t actually need a full asset management solution but instead need something that can capture beacon data and make it available to their existing systems. Our BeaconServer™ fulfils that role.