A common misconception is that beacons can measure distance. In reality, beacons, with the exception of some specialist social distancing beacons and sensor beacons with an additional distance sensor, are designed to send signals rather than receive them.
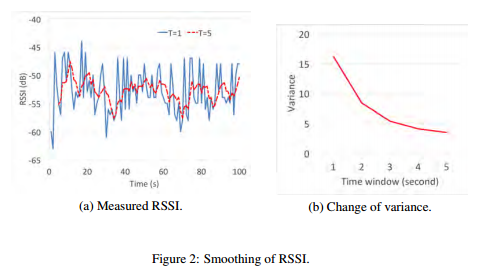
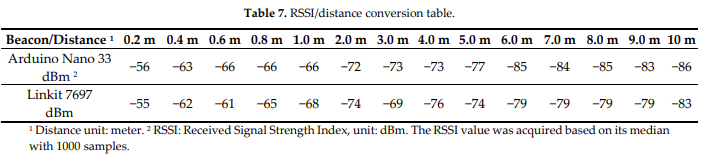
Distance is determined on the receiving device rather than by the beacon itself. Devices such as smartphones are able to detect the signals transmitted by nearby beacons. When a beacon emits its Bluetooth radio signal, the receiving device measures the received signal strength indicator (RSSI), which can then be used to estimate how far the device is from the beacon.
Within a range of a few metres, changes in RSSI are usually noticeable enough to allow the distance to be estimated with reasonable accuracy. As the distance grows, however, these changes become much smaller and less reliable. This means the system can usually identify whether a beacon is nearby or further away, but calculating the exact distance becomes much more difficult.
For instance, Apple’s iOS programming interface CoreBluetooth categorises detected beacon signals into broad proximity groups such as ‘immediate’, ‘near’, and ‘far’. Rather than providing a precise measurement in metres or feet, these categories simply indicate the general closeness of the beacon.
The maximum detection range varies depending on the beacon hardware, but signals can often be picked up from around 50 metres and sometimes up to 100 metres. At these longer distances, however, the RSSI value becomes much less useful for estimating exact distance and instead only suggests whether the beacon is relatively close or relatively distant.