There’s a paper by Mariusz Kaczmarek, Jacek Ruminski and Adam Bujnowski of Gdansk University of Technology on the Accuracy analysis of the RSSI BLE SensorTag signal for indoor localization purposes (pdf).
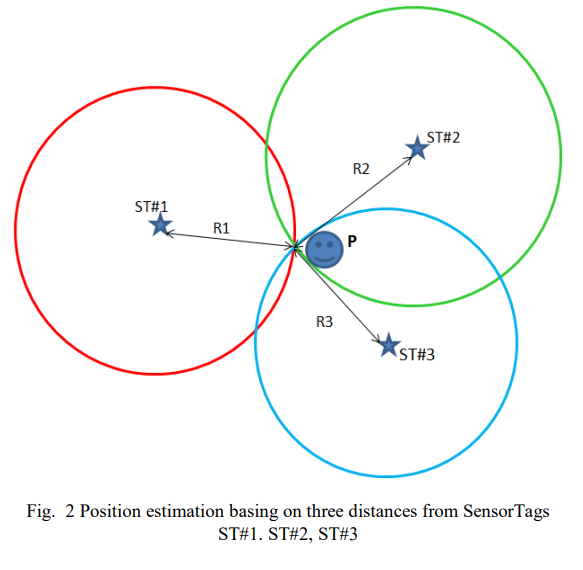
They studied the radio signal from multiple Texas Instruments SensorTag CC2650 devices in order to determine if it could be used to determine location.
They concluded:
“Given the large number of factors governing the received RSSI, calibration is unlikely to be able to compensate for all of
them, leading us to conclude that there is an inherent limit to the accuracy of a BLE positioning system especially when multiple devices are used.”
They suggest:
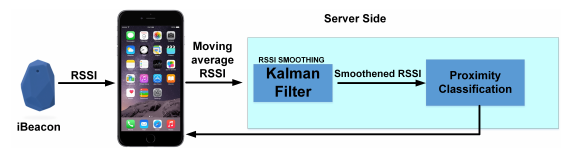
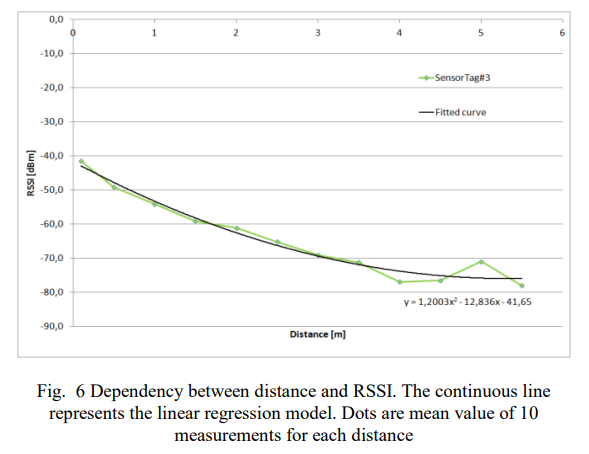
…that instead of using a single RSSI measurement to estimate distance, try using the average or median value of N measurements collected on the same spot (at least N>20) so that you can reduce the effect of small scale fading.