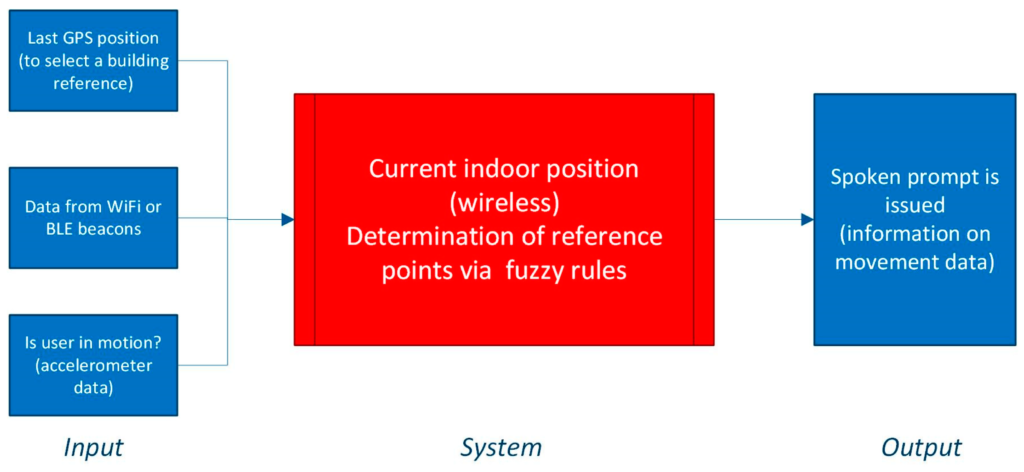
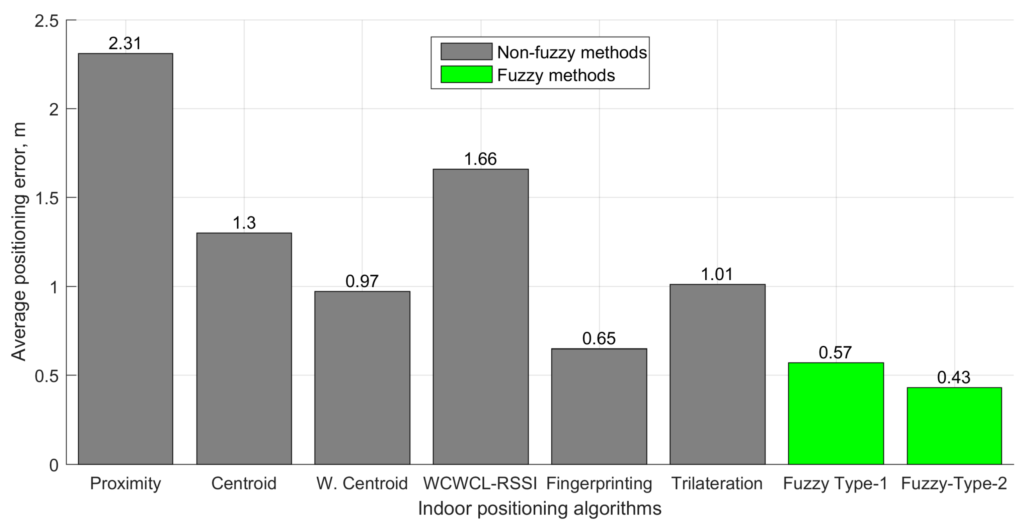
The paper explores indoor location algorithms and implements a fingerprinting system using RSSI that achieves an average error of 0.43m.
The authors’ ‘fuzzy logic type-2’ system allows for complex environments such as buildings with glass/metal corridors. They comment that fingerprinting requires pre-configuration which is one of the main disadvantages of this method.
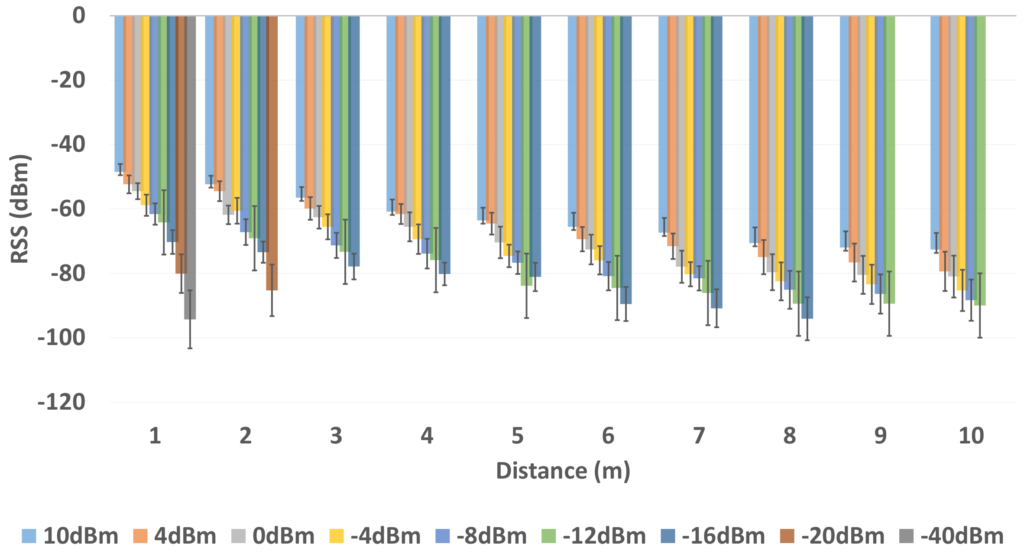
The main insight is that along with the expected difference in the RSSI attenuation there is a considerable difference in the BLE signal variation at all transmission power levels with respect to distance. The variation increases and the localisation accuracy decreases from high to low transmission power levels:
Another observation is that outliers in the data tend to affect the localisation accuracy. Applying filters to the data, they achieved a location accuracy of 2.2 meters with a precision of 95%.
One comment we have is that the researchers didn’t try different beacons. As we mentioned in 2016, the RSSI stability also varies across different beacon models.
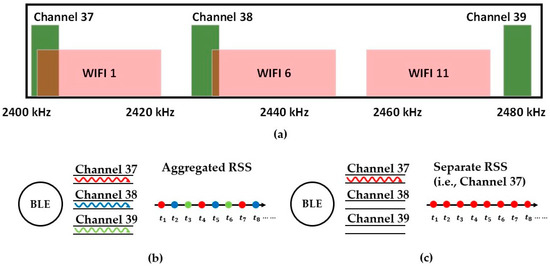
They have observed that the stability of the received Bluetooth signal strength RSSI depends on which Channel 37, 38 or 39 the signal is being received on. This is because the channels slightly overlap the WiFi channels and there can be other Bluetooth devices also using the same channels.
The method analyses the channels over time and chooses those it thinks has least interference and most stable RSSI. This reduces the positioning error by 0.2m, to 2.2m, at a distance of 3.6m.
In our previous post on iBeacon Microlocation Accuracy we explained how distance can be inferred from the received signal strength indicator (RSSI). We also explained how techniques such as trilateration, calibration and angle of arrival (AoA) can be used to improve location accuracy.
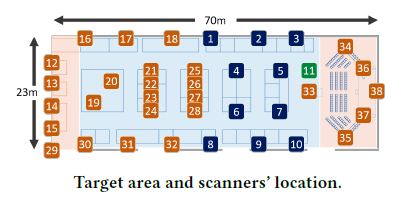
Their study was based on a large-scale exhibition where they placed scanning devices:
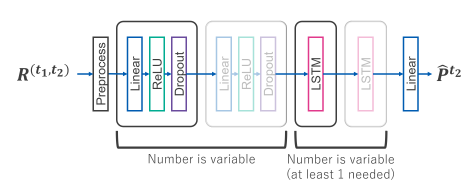
They implemented a LSTM neural network and experimented with the number of layers:
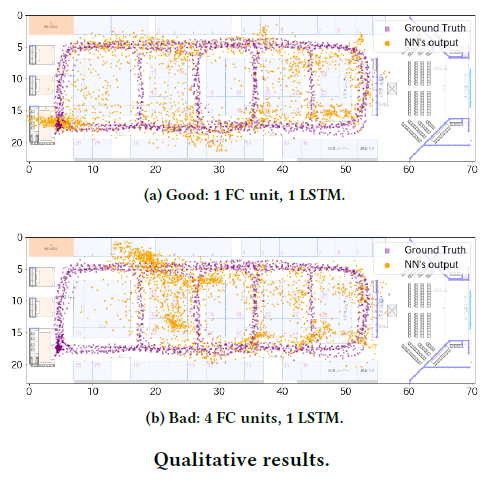
They obtained best results with the simplest machine learning model with only 1 LSTM:
As is often the case with machine learning, more complex models over-learn on the training data such that they don’t work with new, subsequent data. Simple models are more generic and work not just with the training data but with new scenarios.
The researchers managed to achieve an accuracy of 2.44m at 75 percentile – whatever that means – we guess in 75% of the cases. 2.44m is ok and compares well to accuracies of about 1.5m within a shorter range confined space and 5m at the longer distances achieved using conventional methods. As with all machine learning, further parameter tuning usually improves the accuracy further but can take along time and effort. It’s our experience that using other types of RNN in conjunction with LSTM can also improve accuracy.
If you want to view the research paper you need to download all the papers from the conference (zip) and extract p558-uranoA.pdf. Some of the other papers also make interesting, if not directly relevant, reading.
The paper describes a room-level accuracy indoor localization system, based on Bluetooth RSSI, to assess the frailty in older people.
The implementation used smartphones as detectors:
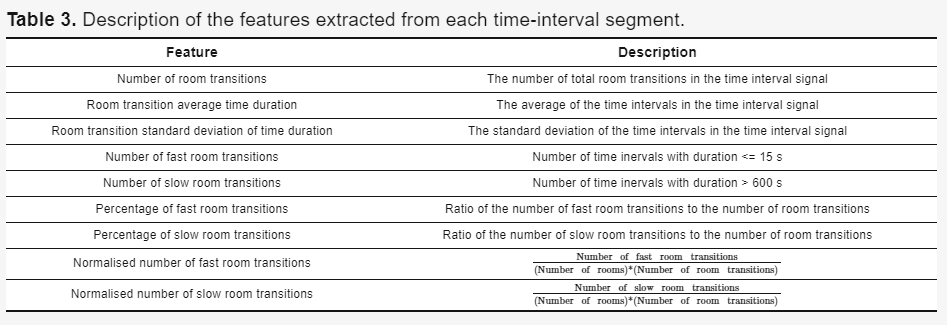
The researchers identified features to classify degrees of movement between rooms:
The system was able to determine rooms to an accuracy above 93%. The results showed subjects with frailty had distinctive movement patterns that could be identified with high accuracy of 98%.
Connected factory implementations require a large number of connected assets for condition-based monitoring, asset tracking, inventory (stock) management or for building automation. Bluetooth is a secure, low cost, low power and reliable solution suitable for use in connected factories. In this post, we examine the reasoning behind some out-of-date thinking on industrial wireless, uncover the real problems in factories and provide some explanations how Bluetooth overcomes these challenges.
Operations teams are usually very sceptical about industrial wireless. They have usually tried proprietary industry solutions using wireless with mixed results. They might have experienced how connections, such as WiFi, can become unreliable in the more electrically noisy areas of factories. The usual approach is to use cable. However, this can become expensive and time consuming. Using cable isn’t possible when assets are moving and becomes impractical when the number of connected items becomes large as in the case of connected factories. As we shall explain, Bluetooth is intrinsically more reliable than WiFi even through they share the same 2.4GHz frequency band.
There’s usually lots of electrical noise in an industrial environment that tends to be one of two types:
Electromagnetic radiation emitted by equipment. This typically includes engines, charging devices, frequency converters, power converters and welding. It also includes transmissions from other radio equipment such as DECT phones and mobile telephones.
Multipath propagation which is reflection of radio signals off, usually metallic, surfaces and received again slightly later.
It’s important to understand how Bluetooth and other competing technologies react to these types of interference. There’s a useful study (pdf) by Linköping University, Swedish Defence Research Agency (FOI) and the University of Gävle on noise industrial environments.
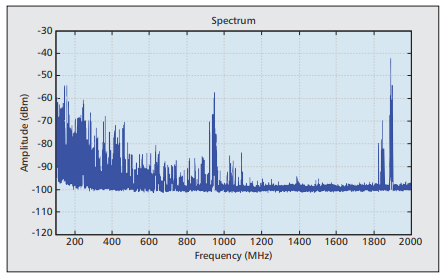
Noise in industrial environments tends to follow the following spectral pattern:
Electrical noise spectrum
There’s usually lots of electrical noise up to about 500MHz. This means wireless communication using lower frequencies, such as two way radio, exhibits a lot of noise. Pertinently, several wireless solutions for industrial applications use frequencies in the 30–80 MHz and 400–450 MHz bands. Bluetooth’s and WiFi’s 2.4GHz frequency is well above 500MHz so exhibits better reliability than some industrial wireless solutions. Incidentally, in the above charts, the peaks around 900 MHz and 1800 MHz mobile phone signals and 1880–1890 MHz come from DECT phones.
The magnitude of multipath propoagation depends on the environment. It’s greatest in buildings having highly reflective, usually metallic, floors, walls and roofs. If you imagine a radio signal wave being received and then received again nanoseconds later, you can imagine how both the amplitude (peaks) and the phase of the received signal becomes distorted over time. Bluetooth uses Adaptive Frequency Hopping (AFH) which means that packets transferred consecutively in time do not use the same frequency. Thus each packet acts like a single narrowband transmission and there’s less affect of one packet on the next one. However, what is more affected is amplitude which manifests itself as the received overall signal strength (RSSI). RSSI is often used by Bluetooth applications to infer distance from sender to receiver. We will mention mitigations for varying RSSI later.
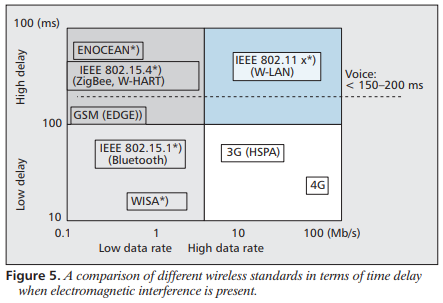
It’s important to consider what happens when there is electrical noise. It turns out that technologies invented to ensure reliable transmission behave much less well in noisy situations. One such technique is carrier sense multiple access (CSMA), used by WLAN (WiFi), that listens to the channel before transmitting and waits until a free channel is observed. CSMA and automatic auto repeat (ARQ) also have re-transmission mechanisms. The retrying can also incur significant extra traffic that can overwhelm the communication in noisy environment. Bluetooth doesn’t use such schemes.
The previously mentioned research classifies different wireless technologies according to the delay when used in noisy environments:
Bluetooth (and WISA) is a good choice for noisier environments. It’s particularly suited for applications with lower data rates and sending at periodic intervals.
A final consideration is interference between Bluetooth and other technologies, such as WiFi, that use similar 2.4GHz frequencies. As mentioned in a previous post, there’s negligible overlap between Bluetooth and WiFi channel frequencies.
In summary, Bluetooth is more suited to electrically noisy environments and also offers low cost, low power and secure wireless communication.
These conclusions correlate well with our own empirical observations. We have found that Bluetooth advertising is still received in environments we have measured, using a RF spectrum analyser, to be electrically noisy around 2.4GHz . We believe this is because Bluetooth advertising hops across three frequencies such that there’s less likelihood of noise on all three. Advertising is also very short, typically taking 1 or 2 ms, making the coincidence of the noise and the advertising less likely than would be the case of a longer transmission.
It has been our experience that solutions using Bluetooth advertising are more reliable than those using Bluetooth (GATT) connections, especially in noisy environments when it’s difficult to maintain the chatty protocol of a connection over a long time period. In noisy situations, advertising is usually seen on a future transmit/scan if the first advertising is lost. By coincidence or design, Bluetooth Mesh is built on communication via advertising rather than connection and for this reason is also reliable on the factory floor.
However, using Bluetooth isn’t a silver bullet. There are situations where factories, or more usually parts of factories, have reflective surfaces or unusual radio frequency (RF) characteristics stretching into unforeseen frequencies. Poorer performing WiFi also needs to be considered in context of choosing between Ethernet and WiFi gateways and Bluetooth mesh.
It’s important to do a site survey including RF spectral analysis. This will uncover nuances of particular critical locations or coverage that can drive subsequent hardware planning. It can also feed into requirements for software processing, for example particular settings for processing within a real time locating system (RTLS) to cater for more varying RSSI.
The Wiki includes information about Bluetooth LE idioms such as advertising, MAC address, Bluetooth name, GATT, transmit power, measured power, range, RSSI, mesh and the new direction finding feature. It also has links to hardware and programming information.
A new direction finding feature has been released for Bluetooth 5.1 (pdf). Using more than one antenna, as used by Quuppa, allows for direction finding.
The paper on Enhancing Bluetooth Location Services with Direction Finding explains how location services currently use RSSI to estimate the distance. Direction finding introduces more advanced Angle of arrival (AoA) and angle of departure (AoD) techniques into Bluetooth 5.
“Should smartphone vendors choose to include Bluetooth direction finding with AoA support in their products, item finding solutions could be enhanced to provide directional information.”
As with the move from Bluetooth 4 to Bluetooth 5 it’s going to be while before we see (non Quuppa) products with direction finding. This feature requires specific hardware and software. Before that, it needs SDKs from the SoC vendors. Existing smartphones, beacons and gateways won’t be able to be upgraded.
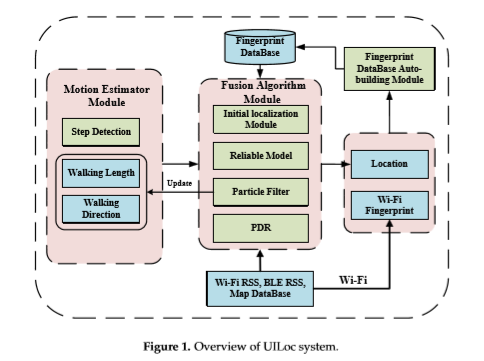
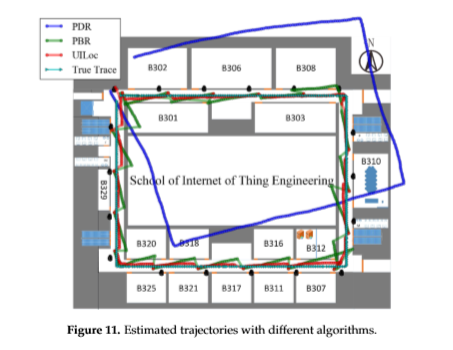
In our previous article iBeacon Microlocation Accuracy, we wrote about ways of using beacon RSSI to determine location. However, what if you were to use and combine beacon RSSI with other ways of locating to create a hybrid method? This is the topic of a new research Unsupervised Indoor Localization Based on Smartphone Sensors, iBeacon and Wi-Fi by Jing Chen Yi Zhang and Wei Xue of Jiangnan University, School of Internet of Thing Engineering, China.
The paper describes UILoc a system combining dead reckoning, iBeacons and Wi-Fi to achieve an average localisation error is about 1.1 m.
The paper also compares the trajectories obtained using different localisation schemes:
RSSI is the signal strength at the Bluetooth receiver. The signal type, for example, iBeacon, Eddystone or sensor beacon is irrelevant. The value of the RSSI can be used to infer distance.
The accuracy of the distance measurement depends on many factors such as the type of sending device used, the output power, the capability of the receiving device, obstacles and importantly the distance of the beacon from the receiving device.
The output power isn’t known to the receiver so it’s sometimes added to the advertising data in the form of the ‘measured power’ which is the power at 1m from the sender.
The closer the beacon is to the receiver, the more accurate the derived distance. As our article mentions, projects that get more detailed location derived from RSSI, usually via trilateration and weighted averages, usually achieve accuracies of about 5m within the full range of the beacon or 1.5m within a shorter range confined space.