There’s new research by Guglielmo Marconi University and University of Rome “Tor Vergata”, Italy on Indoor Localization System Based on Bluetooth Low Energy for Museum Applications.
The use of location in museums allows personalised tour guidance and on-demand exhibit information to be provided. Location also allows analysis of visitor flows to better design spaces through the identification of choke points and redundant areas.

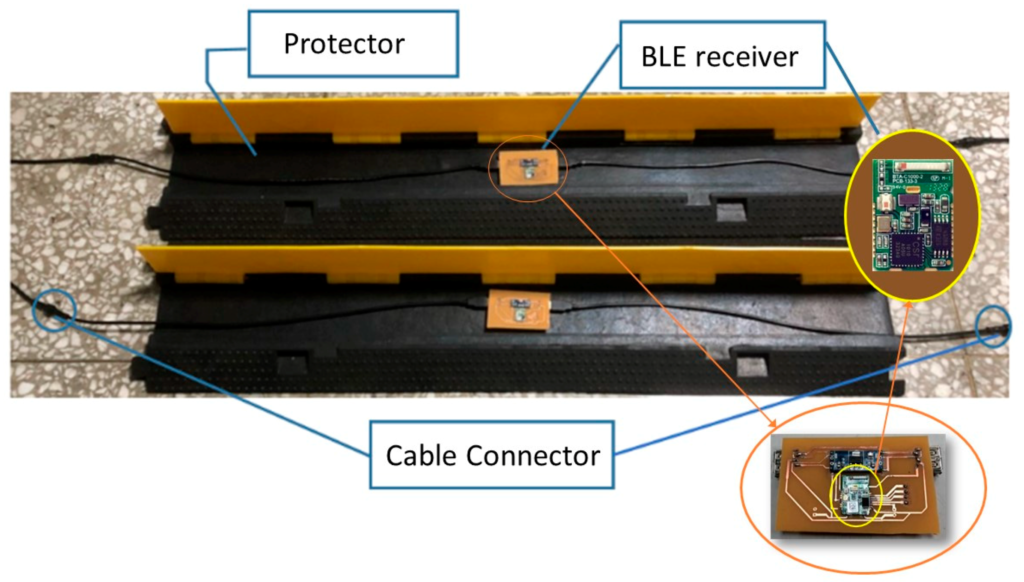
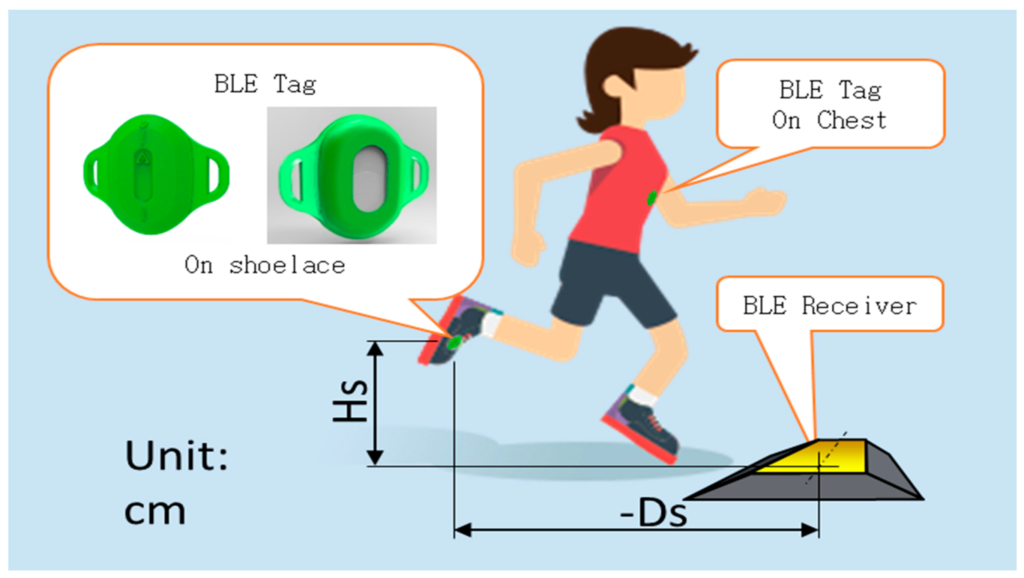
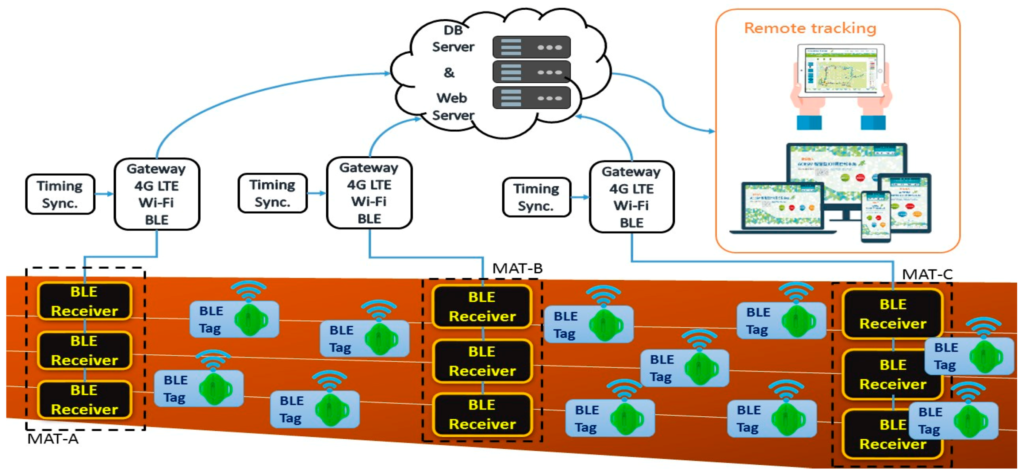
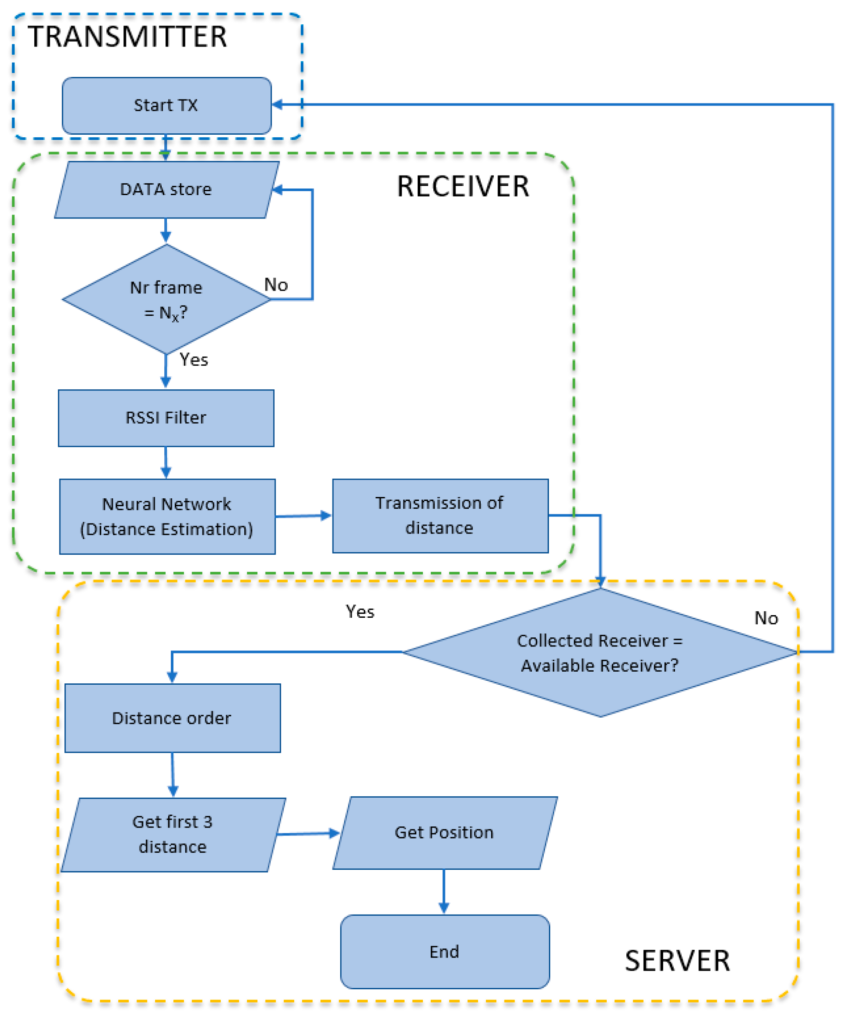
The system had visitors emit Eddystone beacon advertising received by ESP32-based devices acting as gateways to a server.
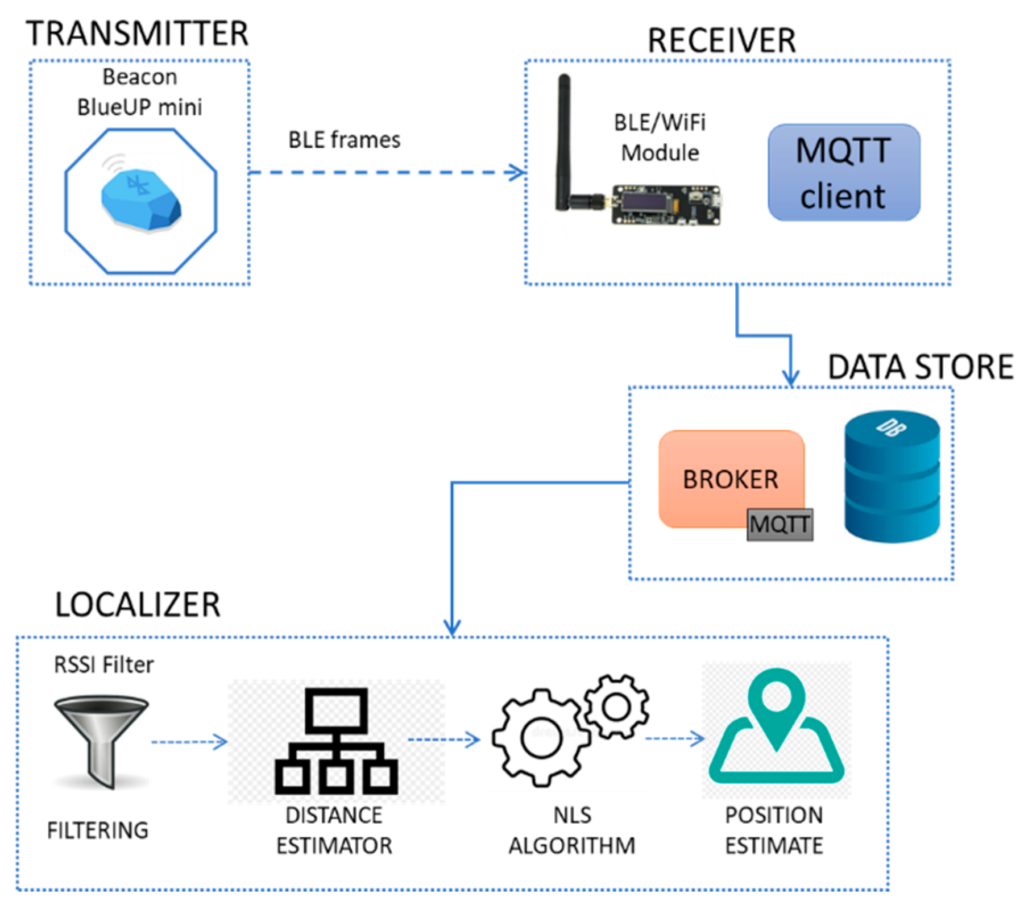
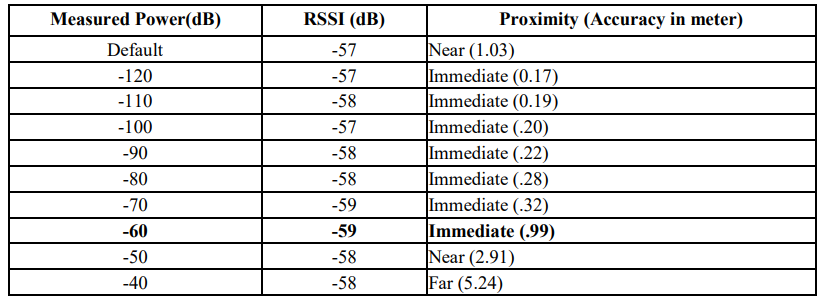
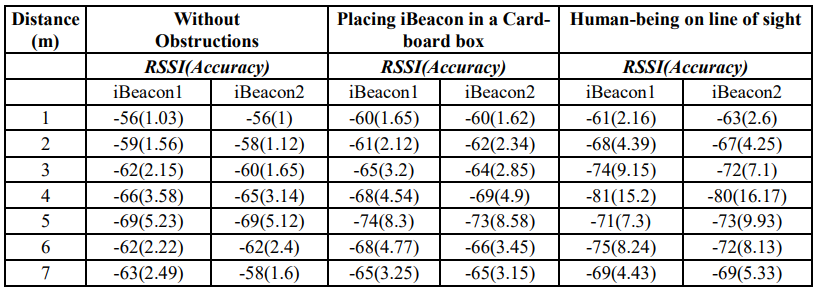
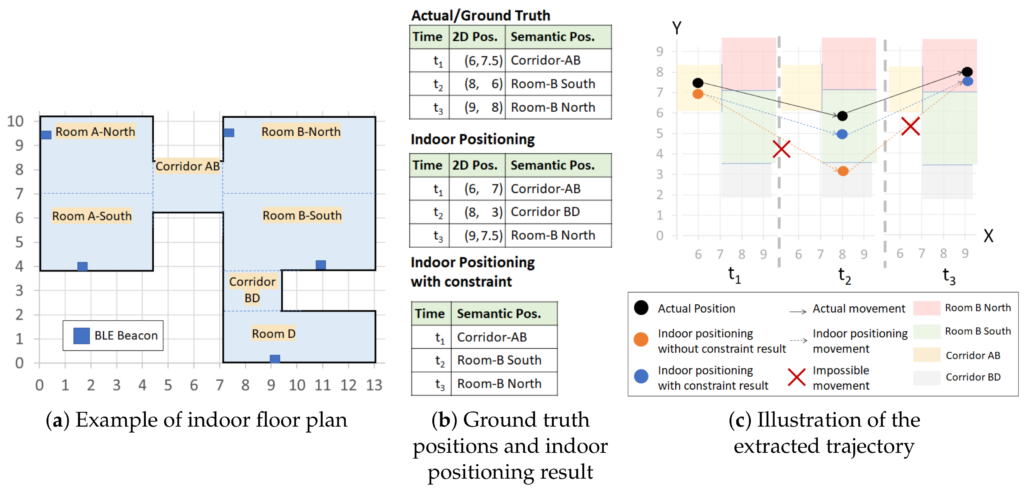
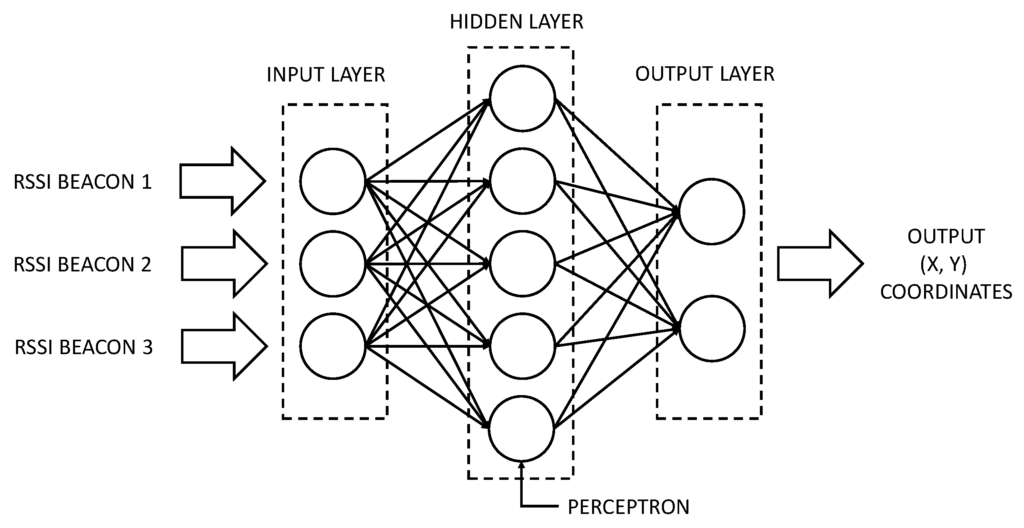
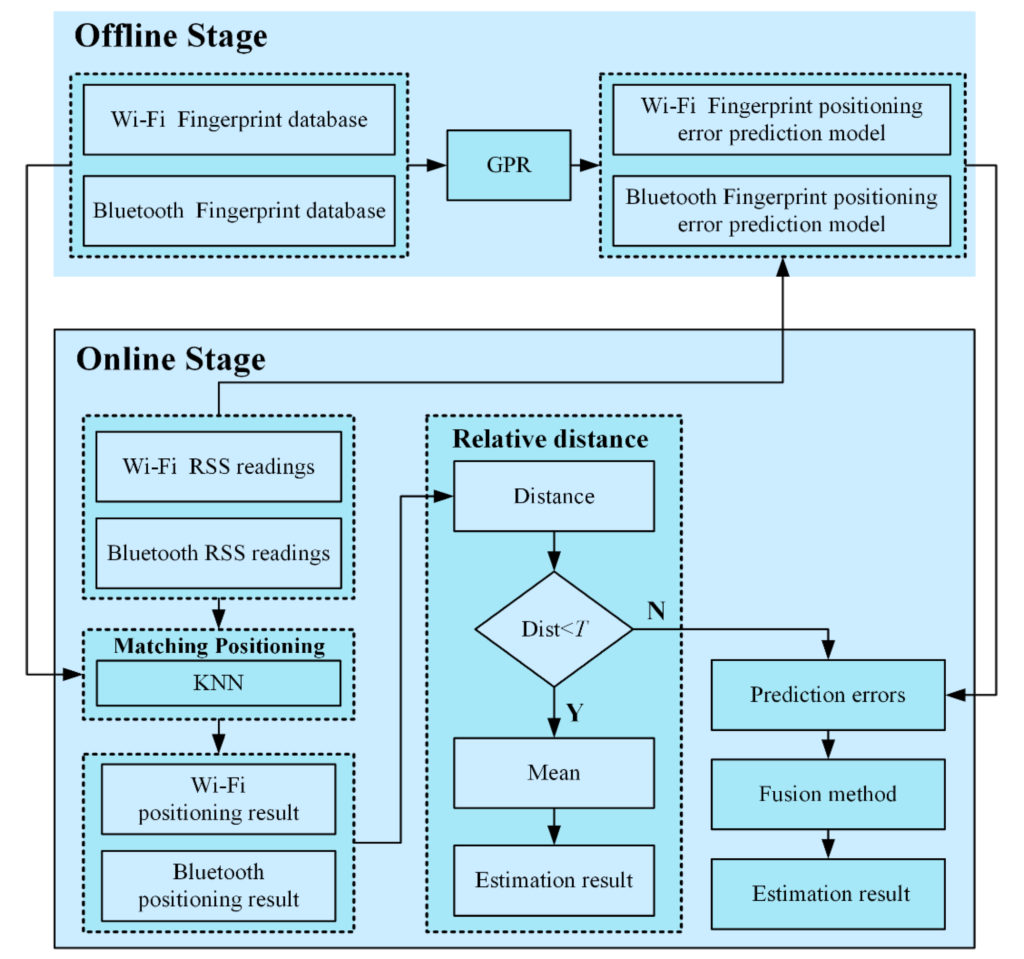
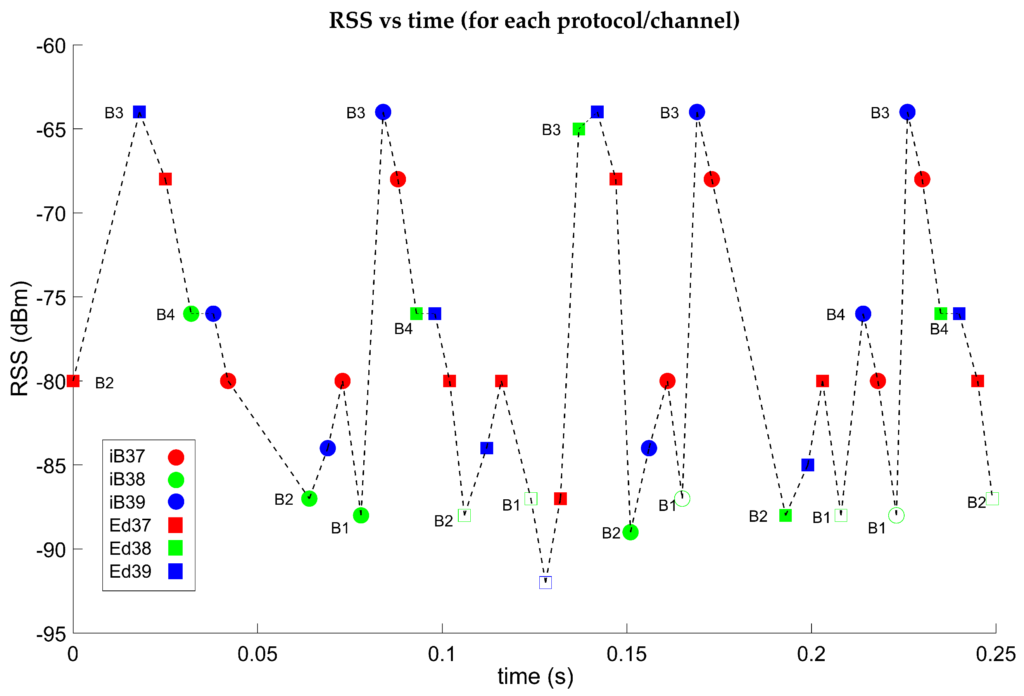
The research is novel in that it uses AI machine learning on the received signal strength (RSSI) to infer location. This helps overcome the problems of variable signal strength experienced in indoor locations due to reflections and obstacles. It also prevents the need for fingerprinting the entire area which is time consuming and fails when the physical situation changes.
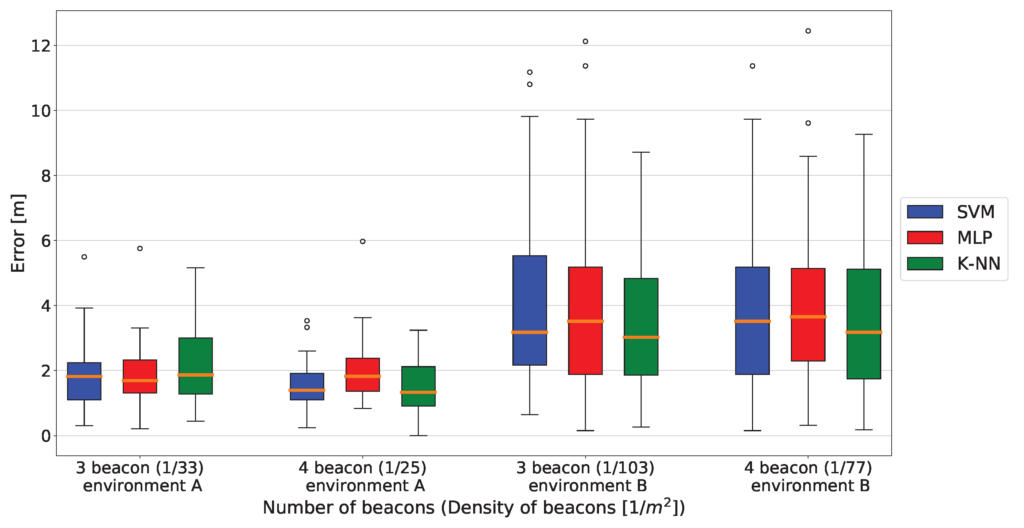
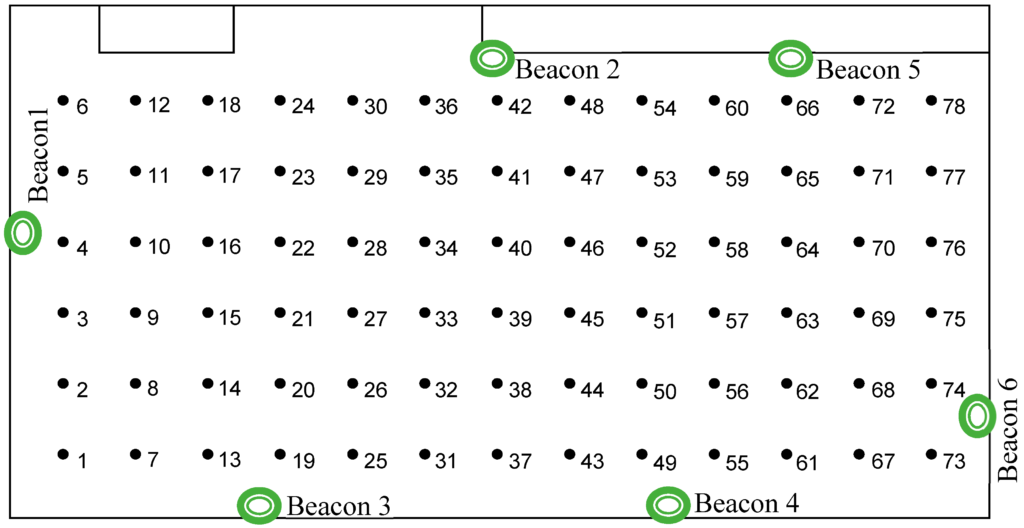
The method achieved accuracy of the order of 2m and this improved to 1m with the use of more receivers.
Read about Using Beacons, iBeacons for Real-time Locating Systems (RTLS)