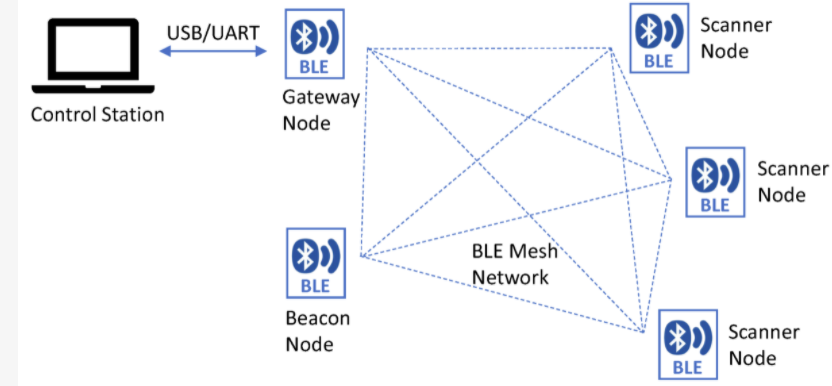
There’s new research from the Department of Electrical Engineering, University of North Texas, USA on Measurement and Analysis of RSS Using Bluetooth Mesh Network for Localization Applications. The paper explains how received signal strength (RSSI) based solutions have accuracy limitations in radio multipath (radio reflective) environments. It describes a solution that improves accuracy using Bluetooth mesh and Bluetooth channel-based processing.
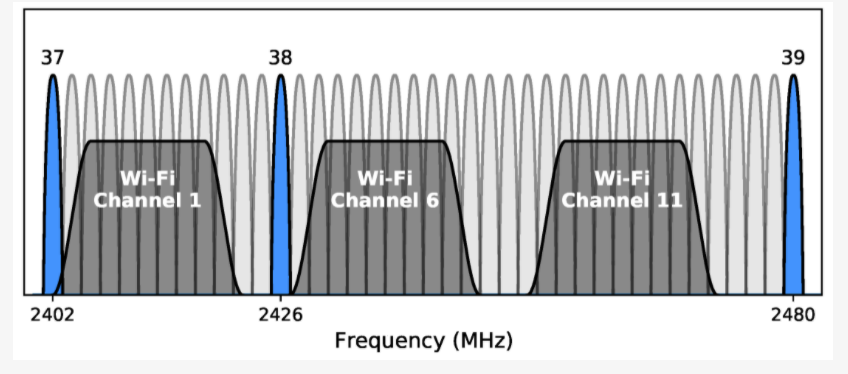
Bluetooth and WiFi Channels
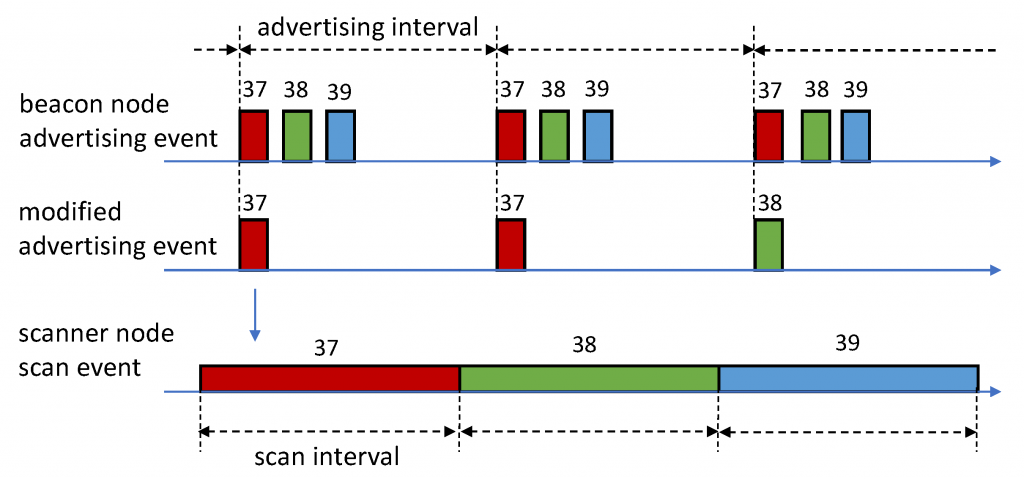
A system was created that exploits the space, time, and frequency diversities in measurements. Different Bluetooth channels have different fading effects.
Advertising was modified to make it Bluetooth channel-aware to be able to differentiate the fading effects. It was possible to reduce the residual fitting errors in the path loss models by using a space-time-frequency diversity combining scheme.
The system was demonstrated using ESP32 BLE modules.
The system significantly reduced the residual linear regression fitting errors in path loss models. It was able to more accurately use RSSI to measure the distance between the transmitter and receiver. The researchers demonstrated it’s possible to implement the proposed multi-receiver configuration and the diversity combining scheme using commercial off-the-shelf standard BLE devices.
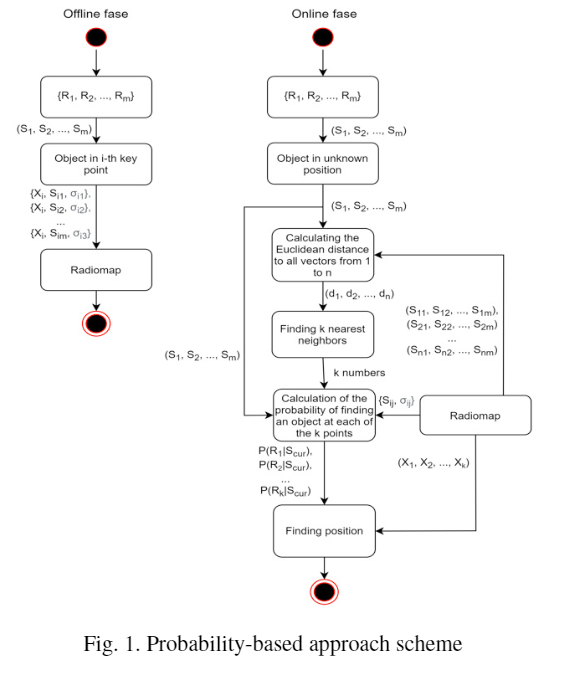
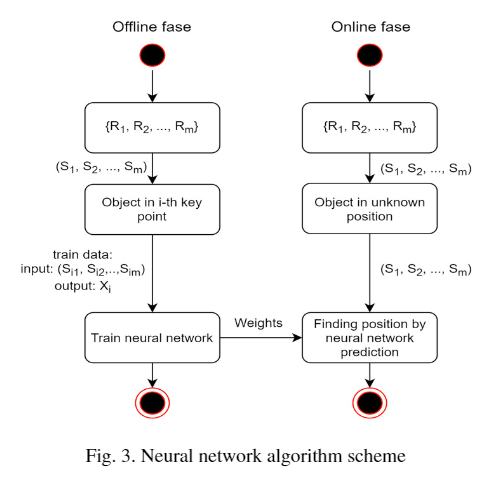
There’s new research by ITMO University, Russia on the Implementation of Indoor Positioning Methods: Virtual Hospital Case. The paper describes how positioning can be used to discover typical pathways, queues and bottlenecks in healthcare scenarios. The researchers implemented and compared two ways to mitigate noise in Bluetooth beacon RSSI data.
The probabilistic and neural network methods both use past recorded data to compare with new data. This is known as fingerprinting. The neural network method is less complex when there’s need to scale to locating many objects. The researchers tested the methods at the outpatient department of the cardio medical unit of Almazov National Medical Research Centre.
Comparison of the methods showed they give approximately the same error of between 0.96m and 2.11m. However, the neural network-based approach significantly increased performance.
There’s new research by the Institute of Information Science and Technologies, Pisa, Italy on Detecting Proximity with Bluetooth Low Energy Beacons for Cultural Heritage. The paper starts by describing alternative technologies including Ultra-wideband (UWB), Near Field Communication (NFC) and vision.
The RE.S.I.STO project allows media on the medieval town of Pisa to be accessible via smartphones and tablets. The system is implemented using the React Native Javascript Framework to allow cross-platform aps to be created on iOS and Android.
Beacons are attached to exhibits and the paper compares two proximity detection algorithms, a ‘Distance-based Proximity Technique’ and a ‘Threshold-based Proximity Technique’. The paper describes stress, stability and calibration testing of the system.
RSSI time series of 5 tags
The researchers found a strong variation of RSSI value for different tags that they say is caused by the varying channel (frequency) used by Bluetooth LE as well as environmental issues such as obstacles, fading and signal reflections.
The system was able to successfully detect the correct artwork with an accuracy up 95% using the Distance-based Proximity Technique.
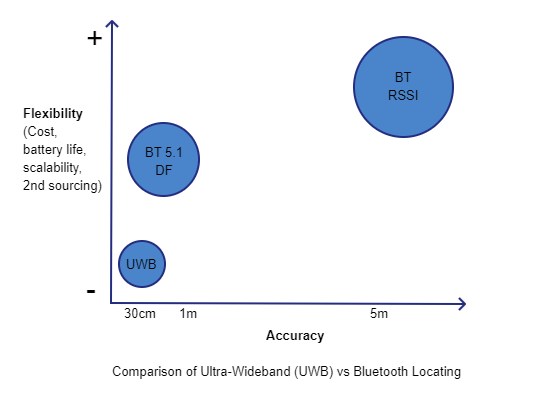
We previously mentioned how cost, battery life and second sourcing are the main advantages of Bluetooth over Ultra-Wideband (UWB). An additional, rarely mentioned, advantage is scalability.
Servers that process Bluetooth or Ultra-Wideband support a particular maximum throughout. The rate at which updates reach systems depends on the number of assets, how often they report and the area covered (number of gateways/locators). Each update needs to be processed and compared with very recent updates from other gateways/locators to determine an asset’s position.
For Bluetooth, updates tend to be of the order of 2 to 10 seconds but in some scenarios can be 30 seconds or more for stock checking where assets rarely move. Motion triggered beacons can be used to provide variable update periods depending on an asset’s movement patterns. This allows Bluetooth to support high 10s of thousands of assets without overloading the server.
For Ultra-Wideband, refresh rates tend to be of the order of hundreds of milliseconds (ms) thus stressing the system with more updates/sec. This is why most Ultra-Wideband systems support of the order of single digit thousands of assets and/or smaller areas. More frequent advertising is also the reason why the tags use a lot of battery power.
How does all this change with the new Bluetooth 5.1 direction finding standard? The standard was published in January 2019 but solutions have been slow to come to the market. The products that have so far appeared all have shortcomings that mean we can’t yet recommend them to our customers. Aside from this, in evaluating these products we are seeing compromises compared to traditional Bluetooth locating using received signal strength (RSSI).
Bluetooth 5.1 direction finding needs more complex hardware that, at least in current implementations, are reporting much more often. The server has to do complex processing to convert phase differences to angles and angles to positions thus supporting fewer updates/sec. Bluetooth direction finding is looking more like UWB in that cost, scalability and battery life are sacrificed for increased accuracy. Direction finding locators are currently x6 to x10 more costly than existing Bluetooth/WiFi gateways. Beacon battery life is reduced due to the more frequent and longer advertising. We are seeing Bluetooth 5.1 direction finding being somewhere between traditional Bluetooth RSSI-based locating and Ultra-Wideband in terms of flexibility vs accuracy.
Despite these intrinsic compromises, Bluetooth direction finding is set to provide strong competition to UWB for high accuracy applications. We are already seeing UWB providers seeking to diversify into Bluetooth to provide lower cost, longer battery life and greater scalability.
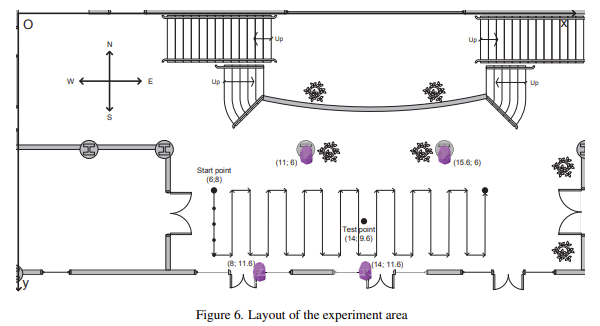
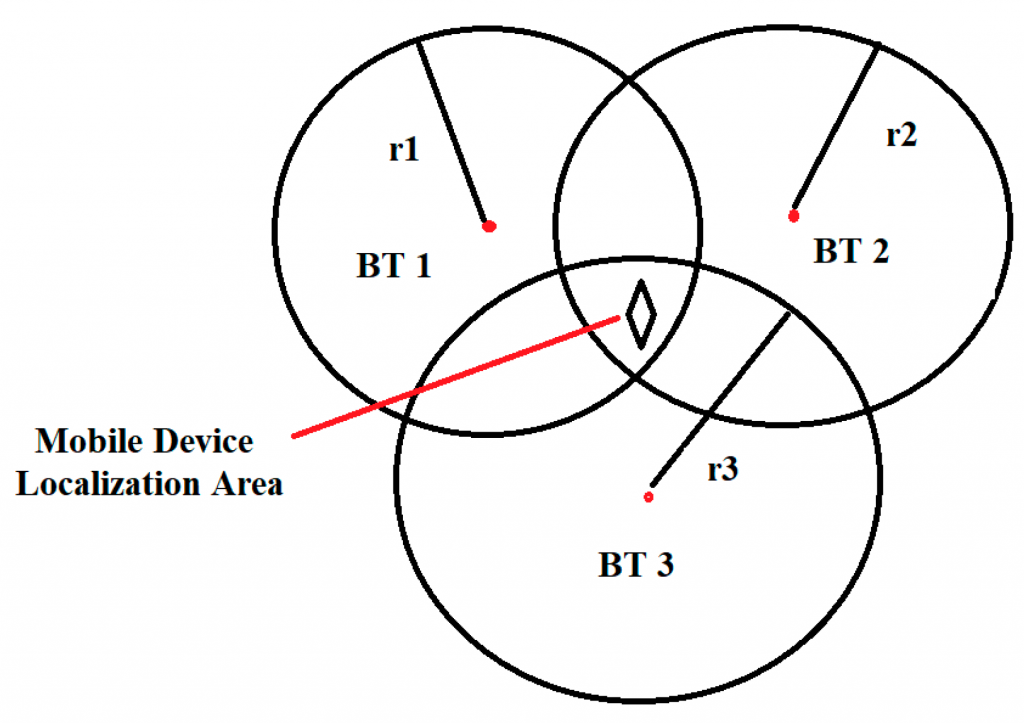
The paper starts by describing trilateration and the author voices the opinion that another method, fingerprinting, requires a lot of effort and isn’t feasible for practical implementation.
The new method makes use of the fact that accuracy is usually good when the received signal strength (RSSI) is -70 dBm or better. The use of more beacons and basing calculations on ‘reliable circles’ of higher signal strength, when available, provides for more accuracy.
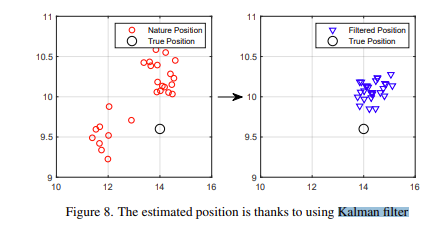
The data is also filtered using a Kalman filter to reduce signal noise by about 37%.
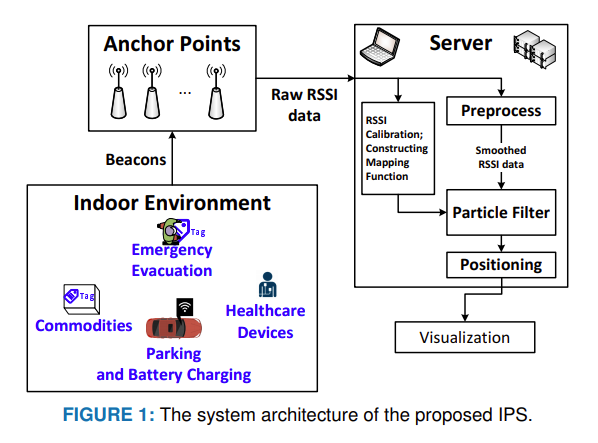
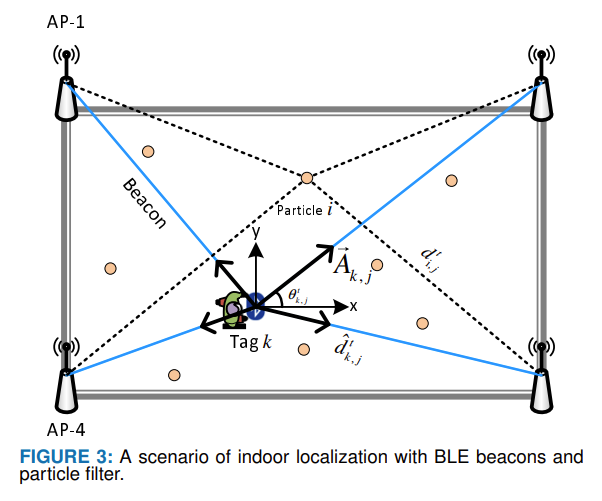
There’s recent research from Korea on Particle Filtering-Based Indoor Positioning System for Beacon Tag Tracking. The paper looks into how to improve positioning accuracy, reduce system complexity and reduce deployment cost through the use of a Particle Filter-based Indoor Positioning System (PFIPS).
A Kalman Filter is used to preprocess collected Received Signal Strength Indication (RSSI) data followed by a Particle Filter (PF) to approximate the location of a tag which improves the location certainties.
Simulations and experiments showed the system outperformed the legacy indoor positioning systems in terms of location accuracy by 24.1% and achieved median accuracy of 1.16 m.
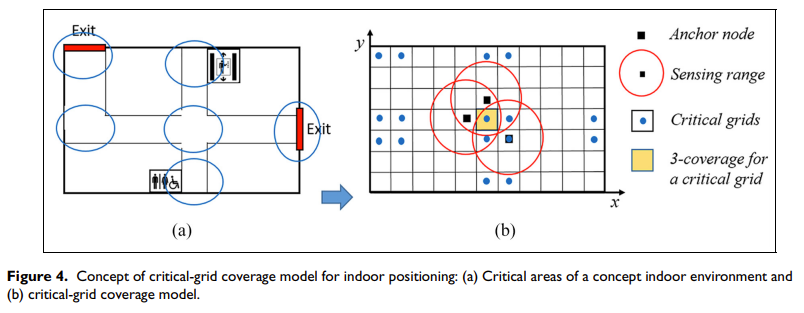
Areas are differentiated as either being ‘critical’ or ‘common’. For example, in a railway station, critical areas are elevator entrances, boarding gates, toilets and the service centre. Critical and common areas have different positioning needs leading to different sensor deployment densities.
The paper examines the variation of RSSI with distance and develops a critical-grid coverage model. A NSGA-II algorithm is used to optimise the placement of iBeacon nodes.
The results showed that the new placement scheme obtained a lower error and a greater reduction of sensor deployment cost than the uniform deployment scheme. The proposed method reduced the cost of sensor deployment while ensuring the accuracy of indoor positioning for critical areas.
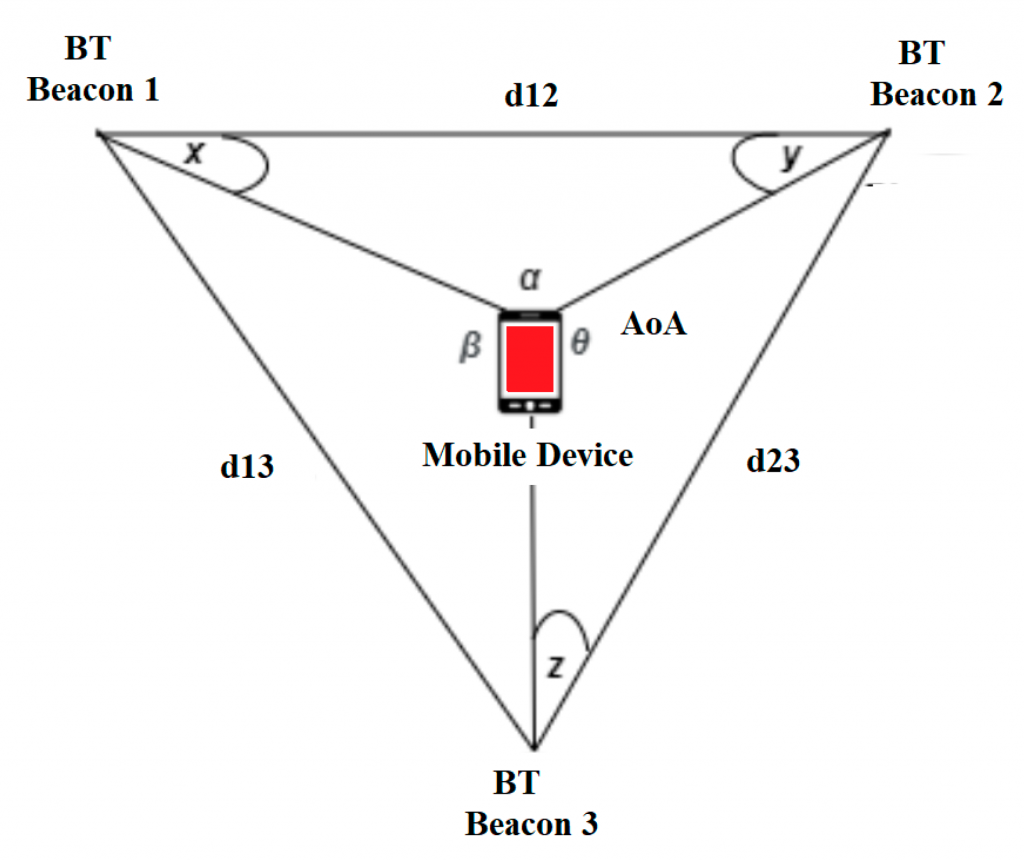
The paper describes an efficient solution for locating, tracking, analysing distribution and flow of people and/or vehicles. Filters and algorithms including artificial intelligence and angle of arrival (AoA) were employed.
Locating using Triangulation
Triangulation Using Angle of Arrival (AoA)
The resultant system provided for analysis of location, traffic flow and passenger movement along routes.
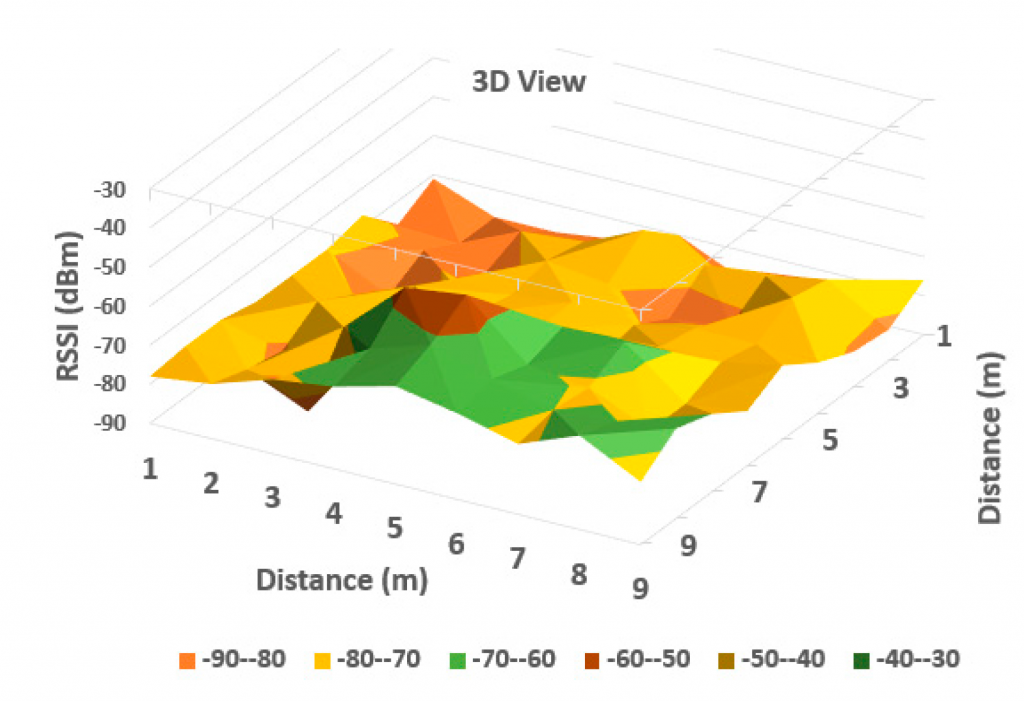
3D RSSI Variation with distance
The researchers found that accuracy was improved when multiple measuring stations were used. Improved positioning was achieved using geometry algorithms (Voronoi) and the k-mean cluster algorithms. Artificial intelligence allowed for deeper analysis of the data for more accurate positioning, trajectory estimation and density evaluation.
The paper examines signal availability, signal stability and position accuracy under different environmental conditions. The aim was to provide recommendations for iBeacon deployment location, density, transmission interval and fingerprint space interval. While the research considered beacons in teaching and learning environments, the conclusions are also applicable to other situations.
The paper describes positioning using the trilateration and fingerprinting methods. Experiments were performed in a 3.44m to 1.80m classroom to determine optimum beacon placement density.
The main conclusion was that greatest signal attenuation and variation was caused by pedestrian traffic blocking the line of sight between iBeacon and receiver. High temperature and strong winds also caused minor discrepancies to the signals. Trees and nearby vehicle traffic didn’t have any negative effects on the signals.
Deployments should consider the line of sight as the first priority. For the above mentioned room size, positional accuracy increased when the number of beacons was increased from three to eight. Using more beacons didn’t improve accuracy. An average spacing of 4.4m is recommended for iBeacon deployment. A settings of 417ms transmission interval is advised as a compromise between battery life and positional accuracy.
There are lots of ways of processing Bluetooth signal strength (RSSI) to determine location. Being based on radio, RSSI suffers from fluctuations, over time, even when the sender and receiver don’t move.
Trilateration and fingerprinting are common techniques to improve location accuracy based on RSSI. The paper improves on these by using analysis based on Kalman filtering of segments delimited by turns. This is used to derive locations based on pedestrian dead reckoning.
The researchers achieved a positioning accuracy of 2.75m.