The Bluetooth SIG, the organisation that produces Bluetooth standards, has a recent post The Myths & Facts About Bluetooth Technology as a Positioning Radio. It talks about the location services in general and how they have evolved over time. It explains how Bluetooth helps solve key enterprise pain points to save tens to hundreds of billions of dollars globally through enhanced operational efficiencies, increased worker safety, and loss prevention.
In manufacturing facilities, billions of dollars are lost through unplanned downtime thanks to being unable to locate assets, tools, and equipment. In warehouses, RTLS can help automate the tracking of assets, such as pallets, which is becoming more essential with the ever-increasing size, complexity, and amount of assets stored
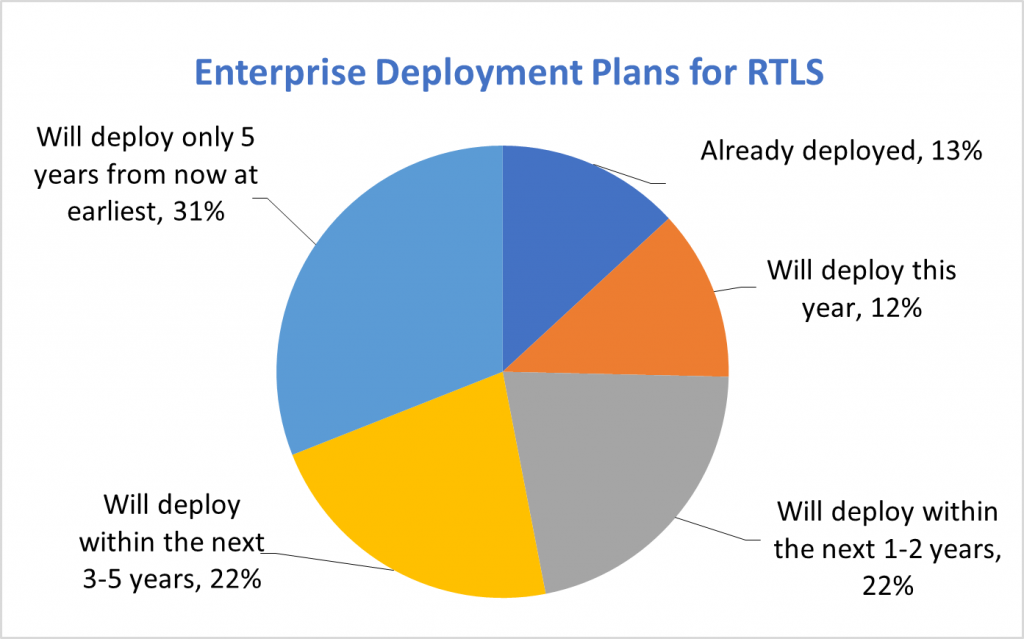
Despite the gains thus far, this only represents as small proportion of the opportunity because only a very small percentage of the potential addressable market in the enterprise is using RTLS.
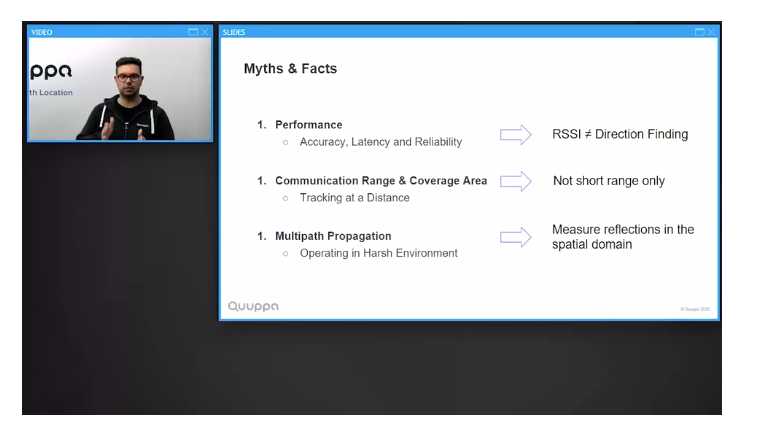
The article continues with a summary of the myths we covered in a previous post.
ABI Research expects that will be a 2.5x increase in total Bluetooth RTLS deployments over the next five years, with the fastest growing segments being healthcare, warehouse and logistics, manufacturing and smart building.