We have had many enquiries from ISVs regarding the possibility of using AoA in the cloud. The idea is to use a location engine instance to allow their multiple customers to access AoA direction finding as a service.
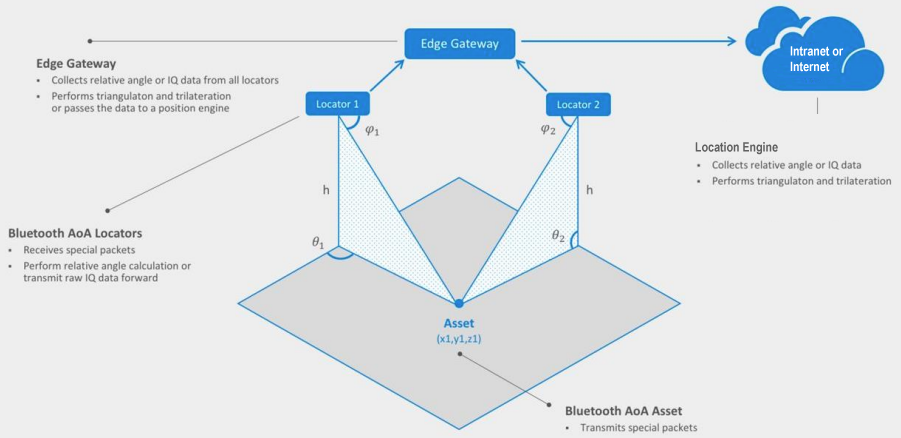
Bluetooth AoA Direction finding works by having multiple locators that communicate with an on-site gateway that connects to the location engine. This is radio data so there’s lots of information sent very often. For large sites, there are multiple edge gateways. In most systems with more than a few assets, the gateway throughput becomes limited by the gateway hardware and the location engine processing input is limited mainly by the CPU capability.
The location engine has to do a lot of work. It implements computationally intensive radiogoniometry and anti-interference algorithms using data from multiple gateways.
In most cases, with large numbers of assets, the gateways and location engine are working near full capacity with the latency of the whole system being balanced against the number of assets.
While such a system can work in the cloud, the bandwidth and latency of the connection to the cloud means that it usually isn’t technically and financially viable. Sharing such a system across customers is even less viable. Instead, standalone systems have to be set up on-site to provide optimum performance.
Be aware that some ‘toy’ evaluation, as opposed to production, AoA systems perform the radiogoniometry and anti-interference algorithms at the gateway. While might work for a few assets, the gateway usually doesn’t have the processing power to scale to a production environment. Also, the gateway is only processing the radiogoniometry and anti-interference algorithms using data it has seen. Production grade radiogoniometry and anti-interference algorithms need to consider data from multiple gateways.
There’s some older but nevertheless useful research from Chung-Ang University, Seoul, Republic of Korea on A Measurement Study of BLE iBeacon and Geometric Adjustment Scheme for Indoor Location-Based Mobile Applications.
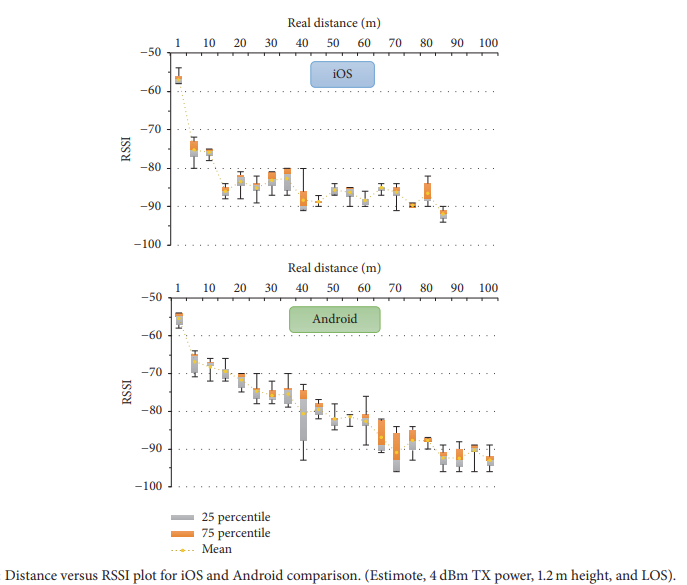
The research looks into detecting beacons on smartphones and using the received signal level (RSSI) to infer distance. The aim was to understand the nuances of the variation of signal to be able to create an automatic attendance checker system.
The researchers looked into the differences between iOS and Android phones, the affect of device placement height, differences between iBeacons from different manufacturers, the affect of reducing to minimum transmit (Tx) power, indoors versus outdoors and the affect of obstacles and WiFi.
iOS showed notably shorter maximum distances of 85 meters and the difference between the maximum distances of iOS and Android turned out to be very large. RSSI readings on Android phone decreased more gradually with distance while iOS showed a sudden drop in RSSI after 10 meters. RSSI readings on the Android platform had more temporal (stability) variation than iOS.
The researchers found it difficult to create a model that could take into account all the variations of RSSI. They said:
We believe that our work provides evidence on the challenges for designing an indoor localization system using commercial-off-the-shelf (COTS) iBeacons devices.
The researchers were trying to create a very accurate RSSI-based system that could use any smartphone and any beacon manufacturer. This isn’t possible. Instead, accuracy has to be compromised, hardware restricted or a different technique used.
Most RSSI systems such as these use gateways rather than smartphones to perform Bluetooth scanning. This removes the smartphone model variability. Using only one beacon model reduces variability.
Newer Bluetooth Direction Finding provides a newer way than RSSI to obtain much better accuracy.
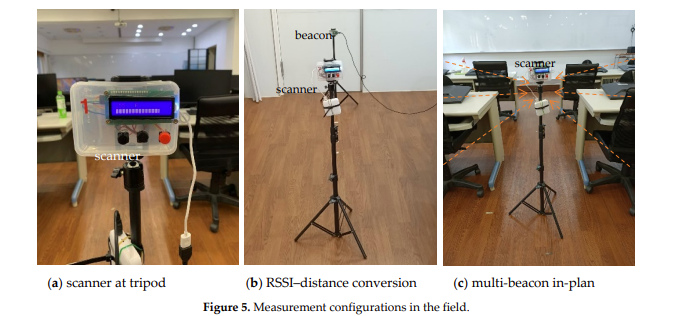
There’s a research paper by researchers from Taiwan on A practice of BLE RSSI measurement for indoor positioning. The paper looks into received signal strength (RSSI) to distance conversion, the significance of antenna plane (orientation) and measurements in two different situations, a low noise classroom and a more noisy manufacturing site workshop.
Techniques employed included developing a signal propagation model, trilateration, modification coefficients and Kalman filtering.
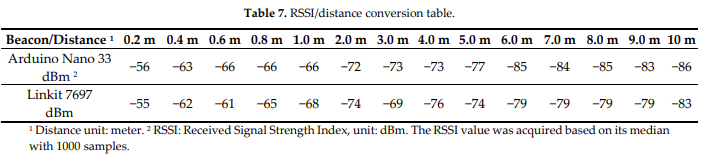
The hardware used included an Arduino Nano 33 (Bluetooth 5) and Linkit 7697 (Bluetooth 4.2). Over 1.6 million samples were collected generating over 13Mb of data.
“Multiple factors affected the RSSI, such as the device performance, antenna direction and radio wave refraction”
A positional accuracy of 10cm was achieved in ideal conditions dropping to meter level accuracy in more challenging setups and environments. The sensitivity of the (ceramic) antenna was found to fluctuate widely with orientation/topology. The researchers concluded that the key factor for reliable indoor positioning, based on RSSI, is maintaining good signal measurement quality.
Fingerprinting is where you first measure the signal levels at various known points and then later compare new data with the old to work out the position. This is usually performed with one signal from each beacon. The researchers increased this to six signals to attempt to improve positional accuracy.
Tests were performed at the campus of the University of Extremadura in Badajoz in the Physics and Mathematics buildings and also outside. Beacons were set up to transmit four slots using the Eddystone protocol and two using the iBeacon protocol. Different transmit powers were used for each slot. Measurements were performed using three different smartphones with a custom developed Android application. The resultant data is available on Zonodo.
The researchers compared a simple Nearest Neighbours algorithm (NN) using all the slots, the one slot with the highest transmission power and the average of all slots from the same beacon. The results showed that using all the slots or just one per beacon gives similar results for accuracy, floor, and Tag ID recognition. Results using the averaged values increased the accuracy by 10%.
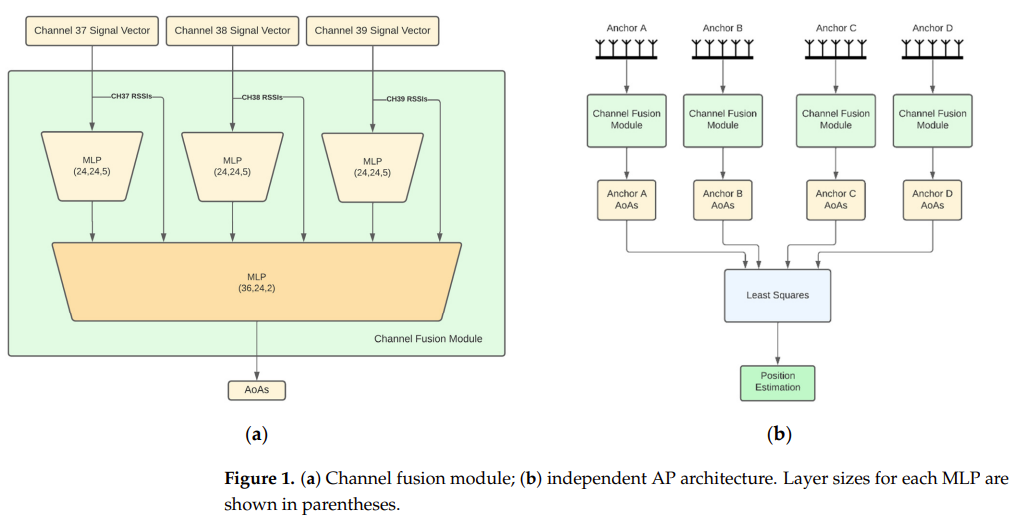
Processing of Bluetooth Angle of Arrival usually requires radiogoniometry spectral analysis of radio in-phase and quadrature-phase (IQ) signals in order to then determine location by triangulation. Instead, this paper proposes machine learning of IQ and signal strength (RSSI) data from multiple anchor points to determine location. AoA processing also uses distributed processing across the anchors to improve performance.
The developed machine learning models were found to be robust against modifications of room furniture configurations and materials and it’s therefore expected that they have high re-usability (machine learning generalisation) potential. The system achieved a localization accuracy of 70cm.
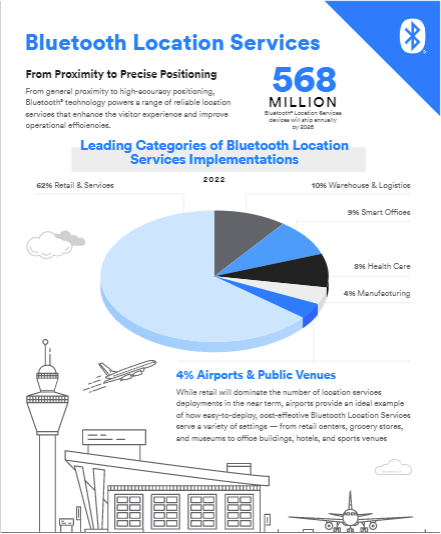
The Bluetooth SIG, the organisation that produces Bluetooth standards, has a recent post The Myths & Facts About Bluetooth Technology as a Positioning Radio. It talks about the location services in general and how they have evolved over time. It explains how Bluetooth helps solve key enterprise pain points to save tens to hundreds of billions of dollars globally through enhanced operational efficiencies, increased worker safety, and loss prevention.
In manufacturing facilities, billions of dollars are lost through unplanned downtime thanks to being unable to locate assets, tools, and equipment. In warehouses, RTLS can help automate the tracking of assets, such as pallets, which is becoming more essential with the ever-increasing size, complexity, and amount of assets stored
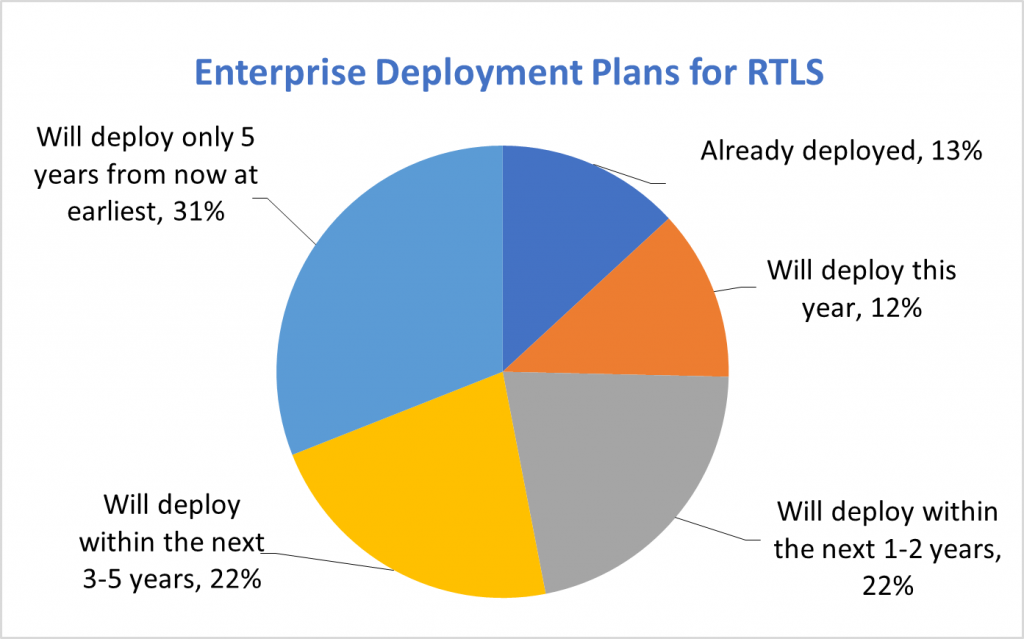
Despite the gains thus far, this only represents as small proportion of the opportunity because only a very small percentage of the potential addressable market in the enterprise is using RTLS.
ABI Research expects that will be a 2.5x increase in total Bluetooth RTLS deployments over the next five years, with the fastest growing segments being healthcare, warehouse and logistics, manufacturing and smart building.
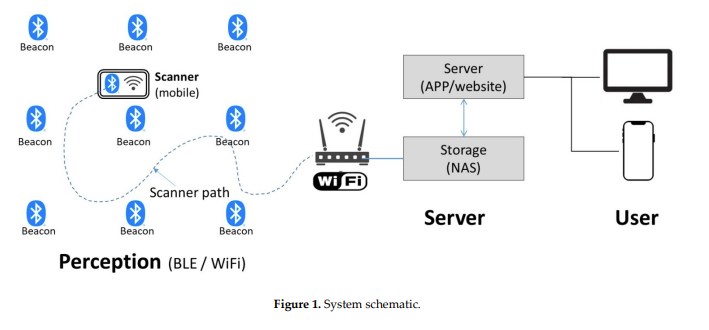
While there has been lots of research into server-side processing to improve location accuracy, this research instead looks into improving accuracy locally, in terms of finding the nearest beacon. This kind of processing is often needed where smartphone apps provide users with contextual information based on their location, for example, in museums.
It’s not possible to use the raw received signal strength (RSSI) because it changes frequently due to changes in blocking and reflection in a room. Any errors in determining the correct transmitter can cause errors in displaying relevant information which, in turn, leads to a poor visitor user experience.
The study involved use of iBeacons detected by Android smartphones, both in a controlled room with three obstacles and a real-world setting Expo Museum.
The proposed algorithm stabilised the RSSI by considering previous measurements to filter out sudden fluctuation of the RSSI signal or the rapid movement of the mobile device. The smartphone’s accelerometer was also used dynamically change the scan interval based on the user’s movement.
In the controlled room, the proposed algorithm had a 14.29% better success rate than a standard algorithm using the raw RSSI values. It performed particularly (20%) better in spaces having medium or high density of physical obstacles. It also performed better in the real-world Expo environment with a success rate of 95% compared to 87% with a standard algorithm.
Performance – There are misconceptions about accuracy, latency and reliability brought over from older systems using only received signal strength (RSSI). Newer systems based on Bluetooth direction finding provide much improved performance.
Communication Range & Coverage Area – People incorrectly think Bluetooth is a short range 10m – 15m technology. This isn’t so. Long range beacons can transmit up to 1.5Km and can work up to 100m in location finding scenarios.
Multipath Propagation – It’s wrongly perceived that Bluetooth is poor in harsh environments. Bluetooth is, in fact, designed for factory floor and additionally newer AoA direction finding can use spectral analysis to reduce the affect of radio reflections.
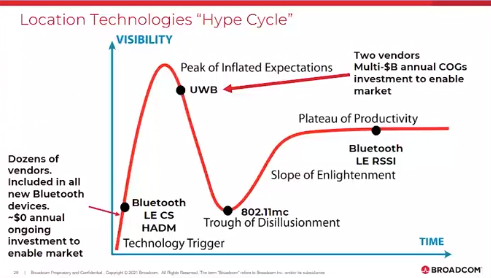
Gabriel Desjardins from Broadcom mentions how location technologies have overcome the peak of inflated expectations caused by UWB and are now in the plateau of productivity provided by Bluetooth LE.
Andrew Zignani shows the results of a survey on RTLS from 213 C-Level decision makers across five main verticals. Only 13% of businesses have already deployed RTLS and there will be a increased uptake over the next 5 years. Technology fragmentation and operational/maintenance cost are incorrectly seen as the barriers to adoption. The new Bluetooth AoA direction finding standard is easing fragmentation. The maintenance cost is actually very low compared to the ROI in most scenarios. Most want beacon battery life to be 90+ days and cost to be $11-$20 that are easily achievable with today’s beacons.
Today’s just-in-time and busy manufacturing processes means that manual tracking of pallets for inbound and outbound shipments often can’t keep pace with the speed of production. Production and assembly requires the quick locating of components. Delays and inaccuracies due to lost components lead to increased costs, employee frustration and ultimately customer disappointment.
Competitive pressures are also driving the need to reduce labour thus reducing the capacity to manually search for items. Customisation using configured options and demand-driven production is also increasing the degree of inbound component searching that exacerbates the problems.
Even those companies using legacy tracking solutions find that location is only as good as the last barcode or RFID scan. Humans get lazy, make mistakes and don’t scan, causing pallets, crates and boxes to get lost. Many RFID readers don’t work reliably near metal components. Relying on a system that can’t find just a few items can be worse that a manual system that works but is slower. Bluetooth asset tracking solves these problems because the location is automatically collected in real-time and is continually updated.
Asset tracking can be applied to items such as components, pallets, cases, tools, returnable assets such as racks and cages as well as items on loan to ensure they are returned on time. It can improve worker safety and provide alerts in cases of congestion, perimeter deviation and lone worker distress. It can ensure forklifts are being fully utilised, are taking an optimum route, haven’t crashed into racking and haven’t gone out of an area.
The real-time visibility allows connected systems to generate confirmation and exception alerts and automatically trigger shipping processes, replacing costly manual workflows. Tracking outputs also allows confirmation that the correct things are loaded on the correct transport.
A Bluetooth-based real time location system (RTLS) increases visibility and allows the manufacturing process to adapt in real-time to short term business needs. It provides cost savings, greater efficiency and business intelligence that can be used to derive larger scale changes based on data rather than gut instinct. Overall reporting of input and outputs provides input to management reporting to monitor the business.