There’s an open source BLE Indoor Positioning library for Android that shows how to locate an Android smartphone in a room of beacons. The Android library uses trilateration to determine the location.
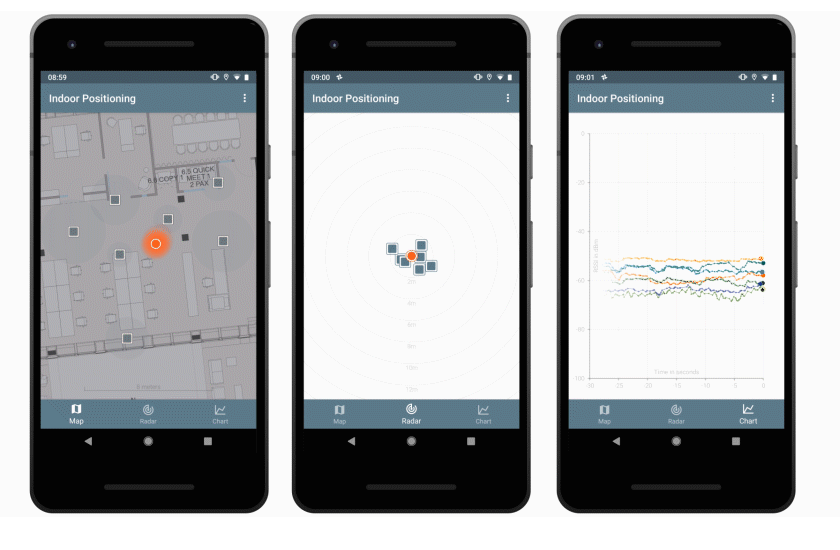
The library is available on GitHub.
iBeacon, Eddystone, Bluetooth, IoT sensor beacons, apps, platforms

There’s an open source BLE Indoor Positioning library for Android that shows how to locate an Android smartphone in a room of beacons. The Android library uses trilateration to determine the location.
The library is available on GitHub.
Researchers at the University of Toronto and the University of Guelph, Canada, have a new paper on Smart Parking System Based on Bluetooth Low Energy Beacons with Particle Filtering (pdf).
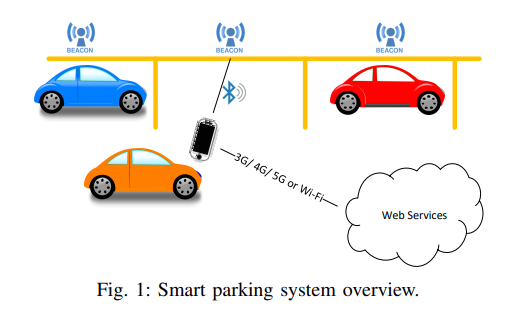
The system uses an Android app and Gimbal Series 21 beacons advertising Eddystone.
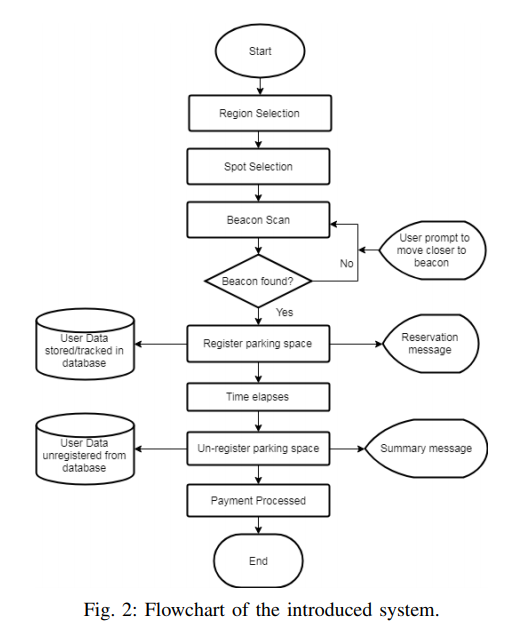
The server side uses an RSSI path loss model, based on Bayesian filtering of RSSI, to improve the accuracy of location estimation.
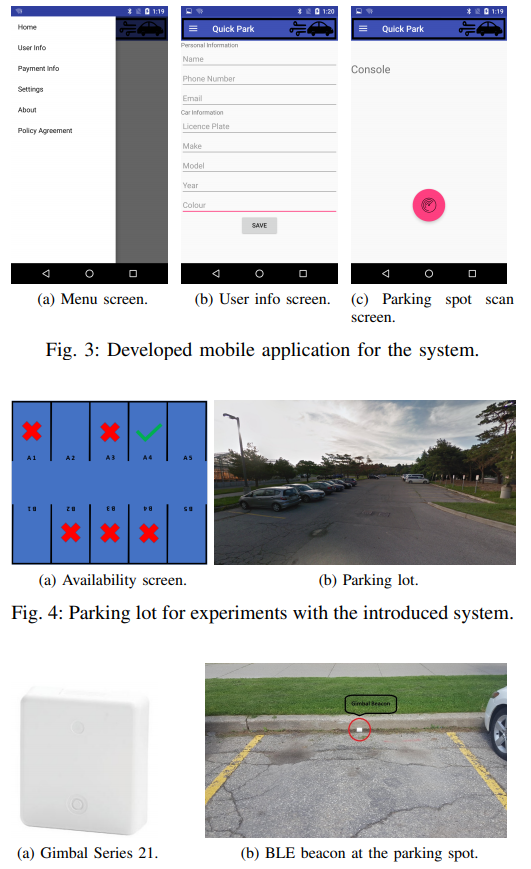
The app provides facilities to register the user/vehicle, locate parking and charge the user based on the exact time used.
Researchers at the Pusan National University, Korea have a new paper on Applying Movement Constraints to BLE RSSI-Based Indoor Positioning for Extracting Valid Semantic Trajectories.
The received signal strength (RSSI) of beacons is often used to infer location. However, the RSSI is subject to reflection and blocking from walls, people and other obstacles causing the derived locations from the raw data to be ‘jumpy’. There are many ways to process the raw data, such as Hidden Markov Models, k-nearest neighbors and Deep Neural Networks (DNN) to obtain smoother trajectories.
The researchers use movement constraints and sliding-window aggregation to extract invalid trajectories and provide real-time semantic trajectories.
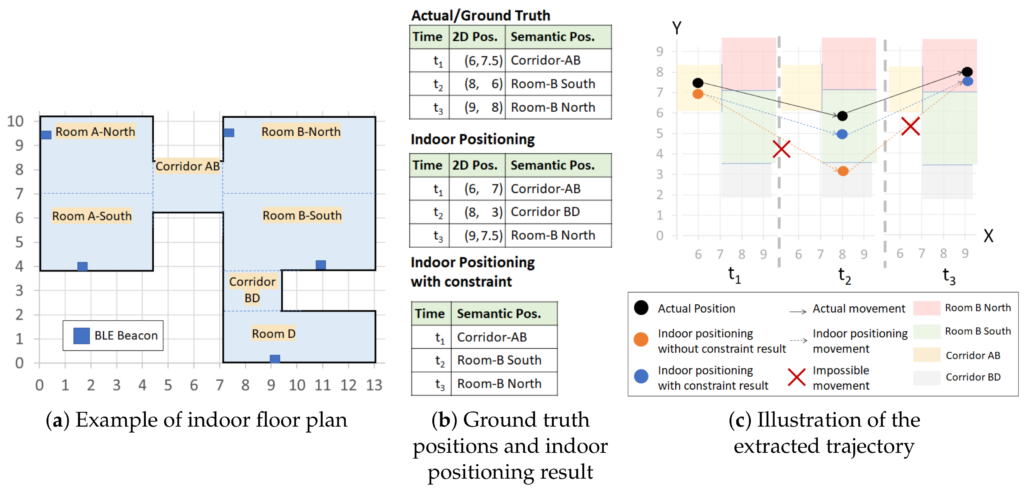
The paper shows the proposed movement constraint-based approach extracts valid trajectories that are comparable to the unconstrained and non-machine language approaches. This new approach is particularly suited to dynamic indoor environments where the reflection and blocking changes over time.
There’s research just published on A Comparison Analysis of BLE-Based Algorithms for Localization in Industrial Environments. The research compares trilateration, fingerprinting and a machine-learning based k-nearest neighbors regressor for determining the location from signals from multiple beacons.
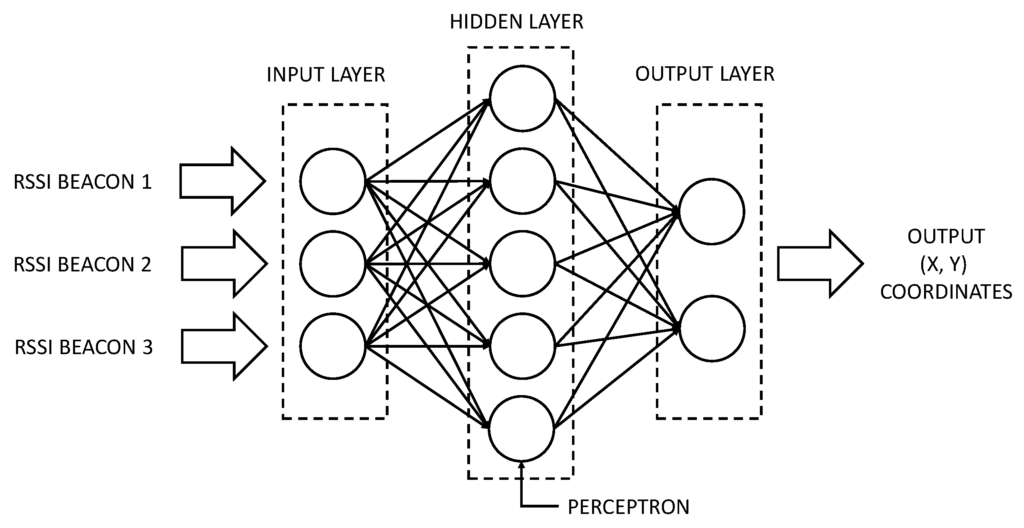
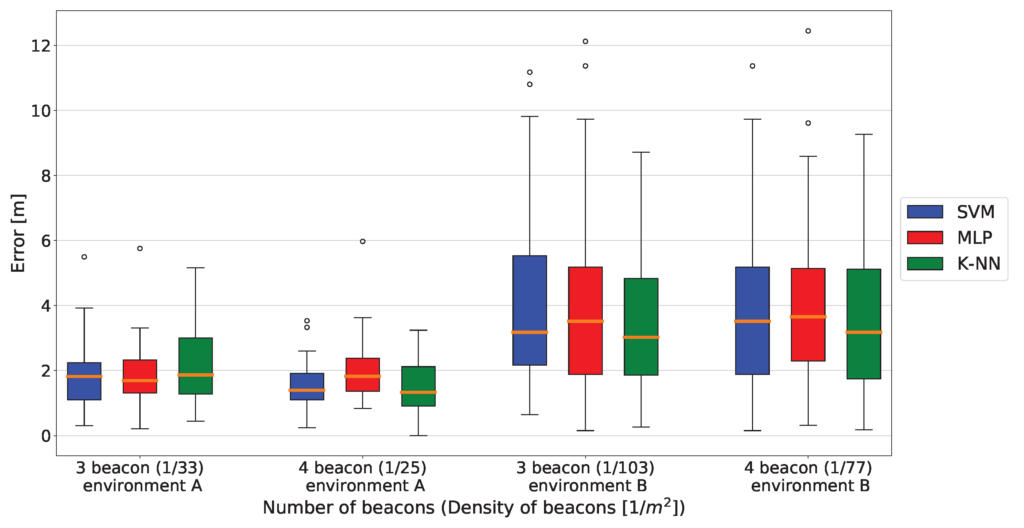
The results show fingerprinting is better than distance-based schemes in industrial environments due to the presence of large moving metal objects that shadow and reflect wireless signals. The three methods were found to provide similar localisation accuracy. The authors say the machine learning method is best due to less complexity and better adaptability. The machine learning method does not need regular calibration as is the case with fingerprinting.
Read about Determining Location Using Bluetooth Beacons
Bluetooth beacons are increasingly being used in the aviation industry to track pallets, unit load devices (ULDs) and audit temperature, humidity and shock levels.

Cargo Airports & Airline Service magazine has an article on the Bluetooth Revolution where it mentions ULD provider Unilode’s use of Bluetooth tags. Unilode is equipping its 125,000 ULDs with Bluetooth readers. This will take over two years but 80% should be fitted out within 18 months.
The most significant development recently in ULDs is the development of Bluetooth Low Energy tracking devices.
The article mentions how Unilode has been exploring the use of RFID over last 25-30 years. It says Bluetooth provides the solution to RFIDs limits of range, infrastructure cost and interference with aircraft systems. Bluetooth additionally allows monitoring of ambient shipment conditions, temperature sensitive cargo and shock sensitive cargo.
The key benefit of Bluetooth is knowing where units are, all the time, rather than relying on scanned updates. It provides for better utilisation of assets. This makes transport of freight easier, smoother and more efficient.
Real-time monitoring of assets allows the client to immediately know when assets are behind schedule, being routed inappropriately, or in poor conditions.
Bluetooth not only provides a scaleable and affordable way of tracking pallets and unit load devices but can also provide for tracking the status of smaller critical packages such as pharma and and cosmetics goods.
Here at BeaconZone, we have seen beacons used more for airline temperature sensing rather than tracking. For example, iB003N-SHT beacons are used by Qatar Airways to monitor the temperature of pre-flight cargo holding areas.
FIND is an open source indoor locating system for home automation, indoor local positioning and passive tracking. It uses your smartphone or laptop to pinpoint your position in your home or office with a location precision of below 10 sq ft.
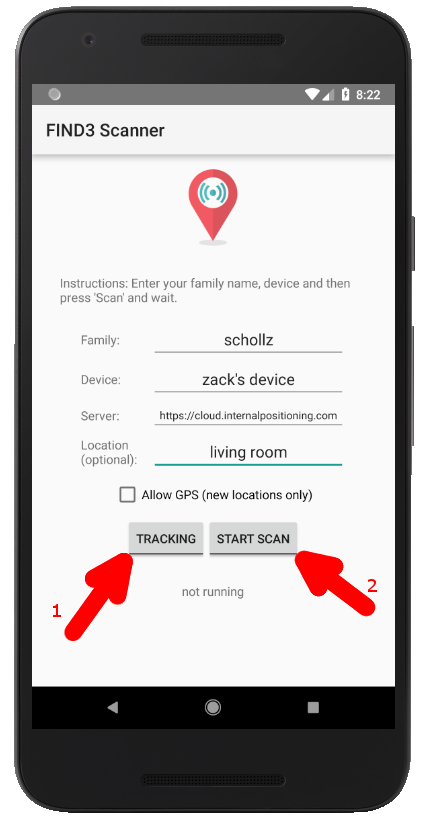
FIND uses scanning of WiFi and Bluetooth:
FIND compiles these different signals can be compiled into a fingerprint which can be used to uniquely classify the current location of that device
Read the documentation, the FAQ and source code on GitHub.
There’s new research by Karan Juj and Charith Perera of Cardiff University on Exploring the Suitability of BLE Beacons to Track Poacher Vehicles in Harsh Jungle Terrains (pdf). The paper describes a real world study conducted in a Malaysian jungle that tracks poacher vehicles.
Deep jungle terrain has challenges because GPS doesn’t work, there’s no cellular connection and 100% humidity can hinder wireless signal.
The study mounted Bluetooth beacons beside a road and placed a concealed receiver inside a vehicle:
The researchers tested various types of obstructions that would be faced in deployment and measured the reliability of detecting beacons from under bonnet:
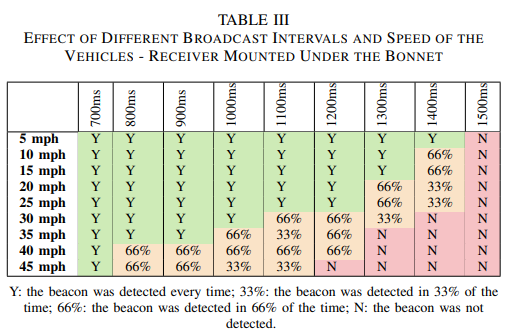
After extensive evaluation, the researchers found that Bluetooth LE beacons can be successfully used in jungle terrains to a track vehicle.
There’s recent research by Beakcheol Jang, Hyunjung Kim and Jong Wook Ki of Sangmyung University, S Korea on An Accurate Indoor Positioning Algorithm Using Sensors and Crowdsourced Landmarks.
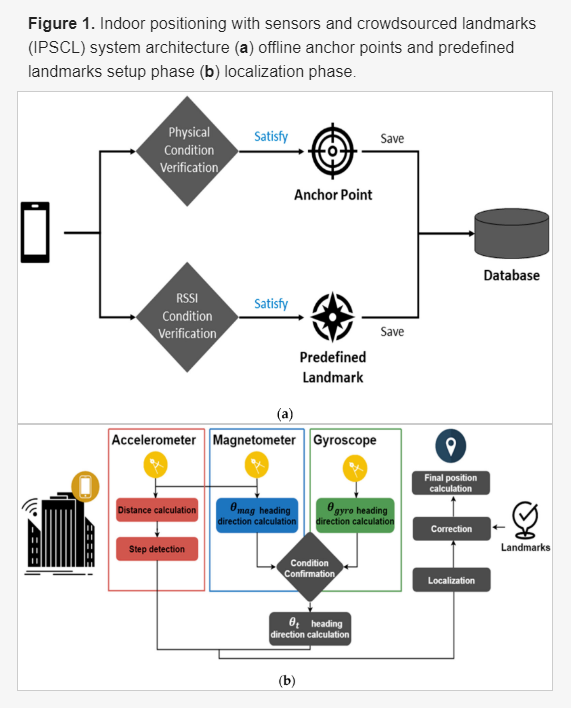
The paper describes how to obtain more accurate heading direction and user coordinates by combining smartphone sensors and iBeacons as landmarks.
There’s recent research by Gabriele Salvatore de Blasi, José Carlos Rodríguez-Rodríguez, Carmelo R. García and Alexis Quesada-Arencibia of University of Las Palmas de Gran Canaria, Spain on Beacon-Related Parameters of Bluetooth Low Energy: Development of a Semi-Automatic System to Study Their Impact on Indoor Positioning Systems.
The paper starts by giving an overview of fingerprinting. It explains how fingerprinting is time-consuming and labour-intensive. Fingerprinting is affected by:
“Reflection, refraction, path loss, large fluctuations, multipath fading, non-line-of-sight (NLOS) conditions”
A problem is that some environment-related factors change over time, such as changes in hardware/furniture, the presence of people and ambient humidity conditions meaning that fingerprinting isn’t a one-off activity.
The researchers conclude that the highest transmission power (+4 dBm) produces the best location accuracy. However, this uses a lot of battery power. Use of the lowest power (−20 dBm) only worsened the accuracy by 11.8%. Similarly, lowering the density of the beacons by around 50%, the error increase was only about 9.2%. Increasing the advertising interval didn’t have a significant impact on the accuracy.
The affect of beacon orientation was assessed and vertical orientation was found to be best. As expected, introducing a slight electrical noise during the positioning phase did not significantly affect accuracy.
Read about Locating with Beacons
There’s a useful recent research paper by Basem AL-Madani, Farid Orujov, Rytis Maskeliūnas, Robertas Damaševičius,and Algimantas Venčkauskas on Fuzzy Logic Type-2 Based Wireless Indoor Localization System for Navigation of Visually Impaired People in Buildings.
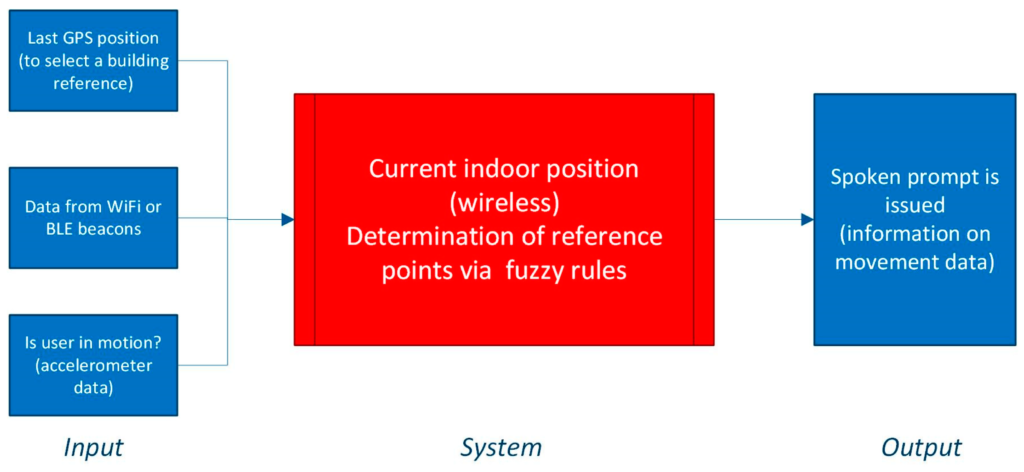
The paper explores indoor location algorithms and implements a fingerprinting system using RSSI that achieves an average error of 0.43m.
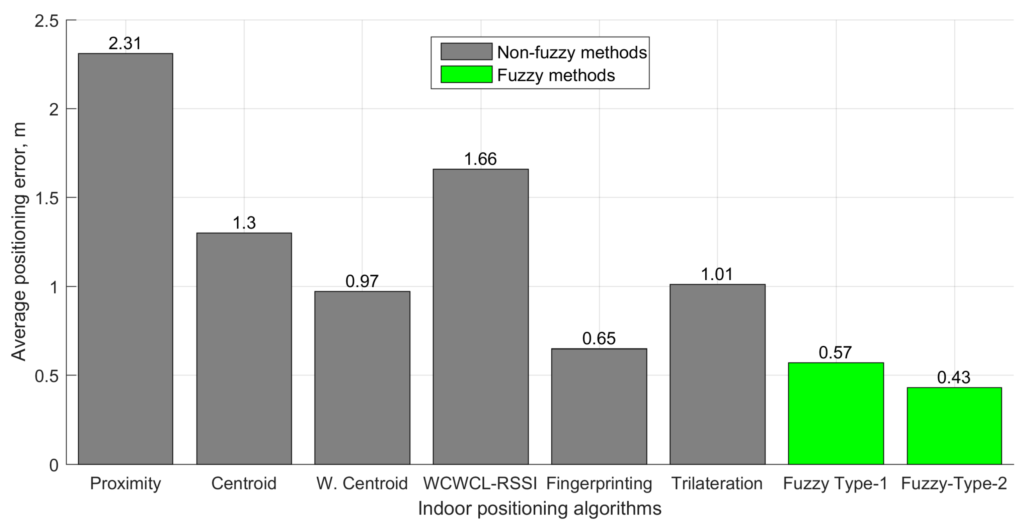
The authors’ ‘fuzzy logic type-2’ system allows for complex environments such as buildings with glass/metal corridors. They comment that fingerprinting requires pre-configuration which is one of the main disadvantages of this method.