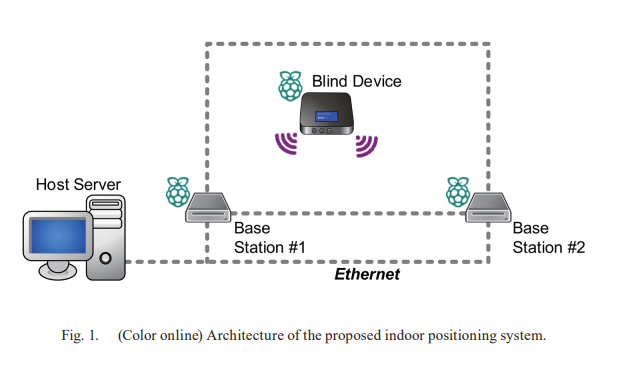
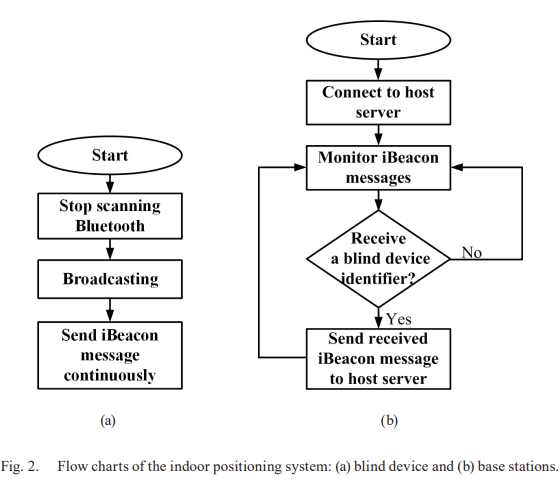
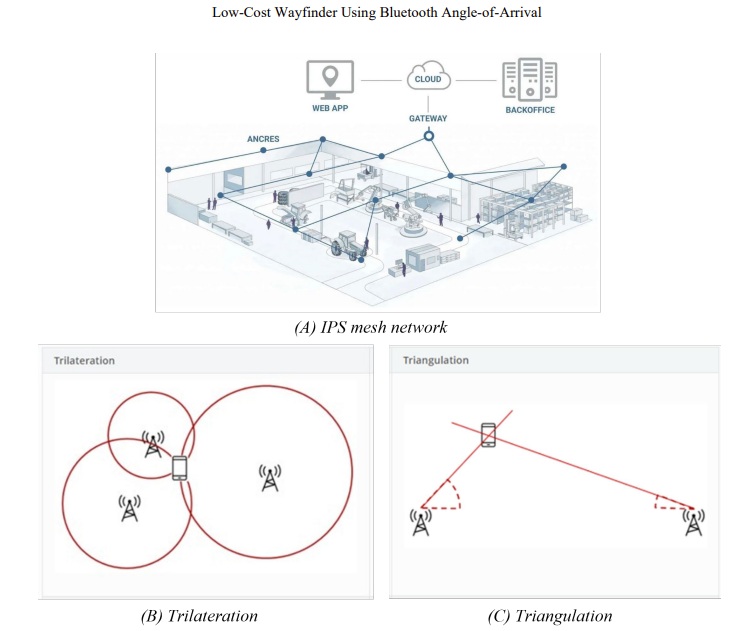
There’s a new paper (pdf) on a low-cost wayfinder system using Bluetooth’s Angle-of-Arrival (AoA) technology. This system is designed to help visually impaired individuals navigate public spaces, such as airports or shopping centres. The innovation lies in moving the antenna array required for angle measurement onto the user’s device, simplifying the beacon infrastructure. Each beacon becomes a low-cost, single-antenna transmitter, significantly reducing the deployment cost compared to traditional indoor positioning systems.
The prototype, built with Bluetooth 5.1 boards and developed using Python, successfully demonstrated accurate angle and distance measurement. The system achieved a 10° angle accuracy within 15 meters and calculated distance using the Received Signal Strength Indicator (RSSI). For visually impaired users, the system could be extended with a voice notification feature. The ultimate goal is to develop the system into a smartphone app.
Future enhancements include addressing front-and-back signal ambiguities by adding orthogonal antennas and extending the system’s range.