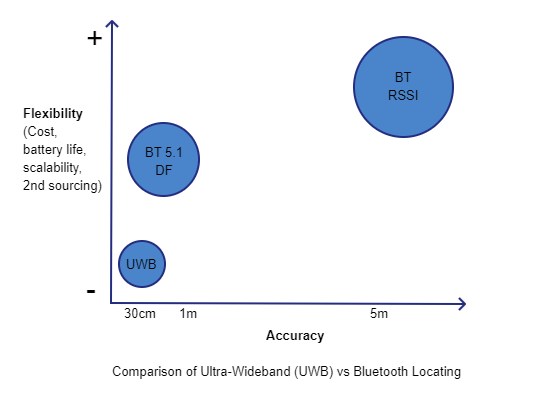
Bluetooth direction finding promises sub-meter accuracy. In practice, the accuracy varies depending on factors such as the locator hardware quality, radio signal noise, surfaces causing radio reflections, the accuracy of locator placement and beacon orientation. The sophistication of the location engine software in mitigating some of the aforementioned factors can improve the accuracy.
As a guideline, our Location Engine with the Minew G2/AR1 tends to find beacons with a maximum angular error range between 6° to 10°, depending on the above factors. The error in position due to an error in angle gets magnified with distance from the locator. Hence, the accuracy also depends on the distance between the locator and the beacon.
Here are graphs of error vs distance for 6° error and 10° error:
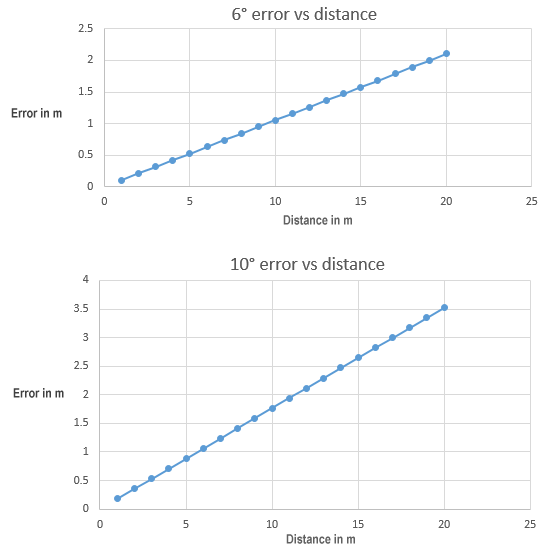
The above accuracies are for hardware such as the Minew G2/AR1 with PCB antennas 50mm apart. It’s expected that greater accuracies might be achieved with hardware having greater inter-antenna distances.
It can be seen that the sub-meter promise has caveats. We have some tips to help reduce angular errors. Averaging data, over time, also reduces angular error with the trade-off of increased latency of detecting location changes. As with all locating technologies, headline performance claims need to be carefully examined and are only achievable in particular situations.
Read about PrecisionRTLS™