
Bluetooth direction finding Angle of Arrival (AoA) uses multiple antenna in one device that uses the phase difference of signals received at different antenna to determine the angle and hence location of a beacon.
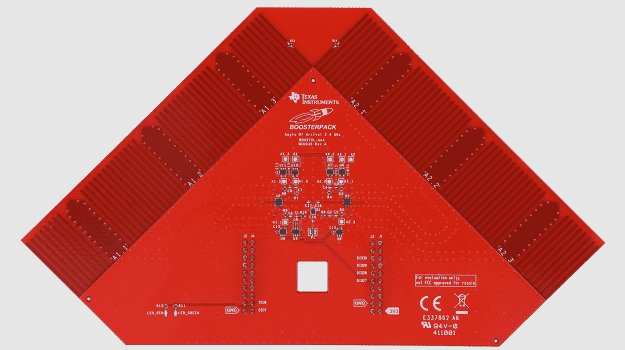
We are seeing a variety of designs but most use printed circuit board patches for antennas for reasons of cost and compactness.

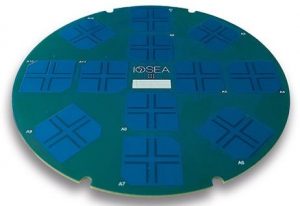
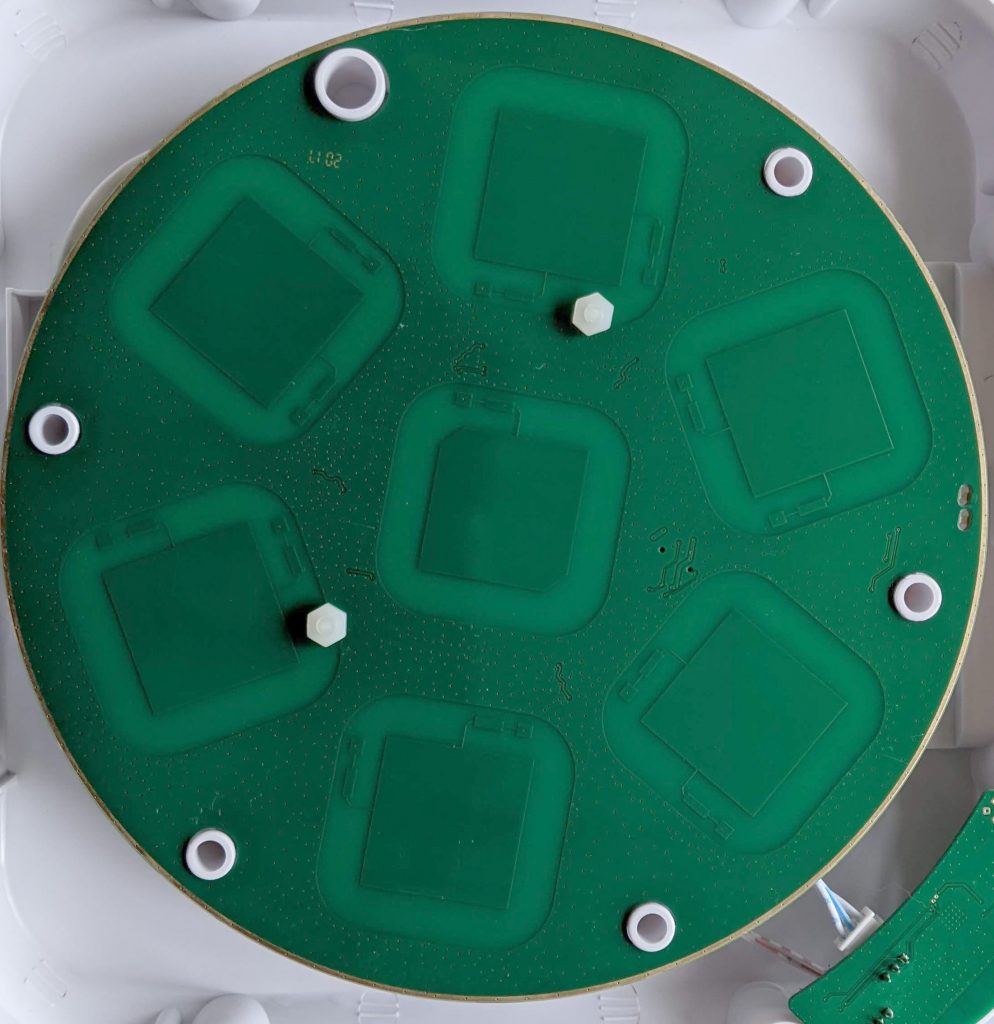
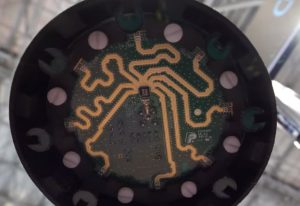

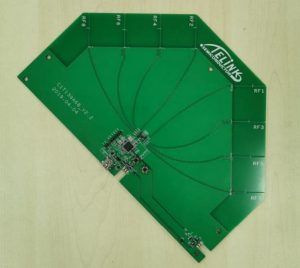
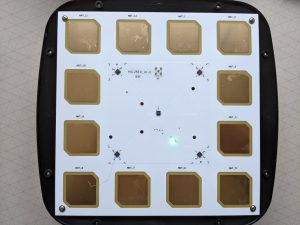
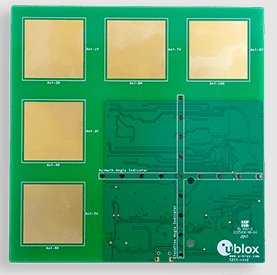
All these designs use a radio frequency switch that switches each antenna, in turn, to just one Bluetooth chip to save cost and complexity. You can see this in some of the designs as tracks leading from each antenna to one chip and then one track from that chip to the Bluetooth system on a chip (SoC). The switch is very fast, of the order of 1 microsecond, to capture the same origin signal across all antennas.
Take care to purchase production-ready hardware. While there are currently many antenna array designs, some are just prototype or reference boards not intended for production. The software accompanying prototype or reference boards also tends to be non-existent and in cases where it does exist, it won’t scale to more than a few beacons.
In practice, a location engine employing AoA radiogoniometry is required to process the radio signals from the Bluetooth SoC. The radio signals are also wirelessly noisy and have to be processed to mitigate reflections, interference and signal spread delays. Additional processing is needed to triangulate the angles from multiple locators. All this isn’t trivial given that the algorithms are computationally expensive and have to be executed extremely quickly to support a large number of beacons.
Read about BluetoothLocationEngine™
Read about PrecisionRTLS™