
Bluetooth direction finding uses locators that have multiple antennas. The antennas tend to be flat patches on a printed circuit board (PCB).
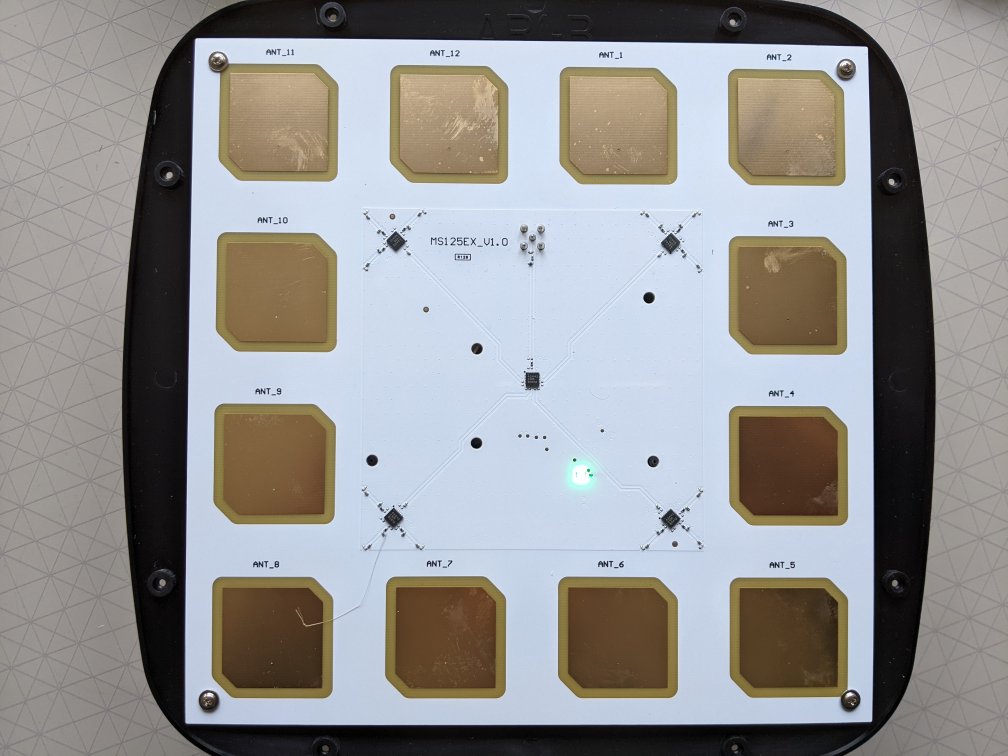
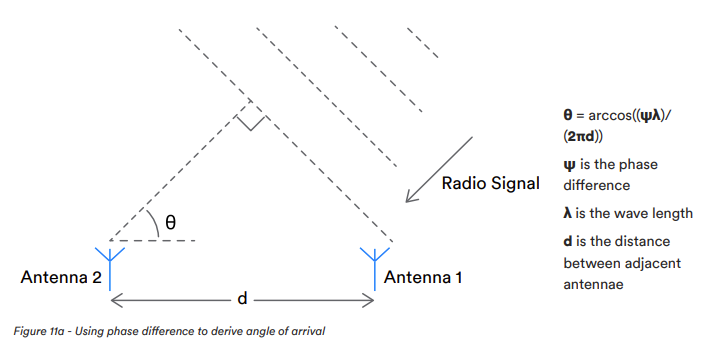
The antennas receive the same radio signal but at slightly different times based on the incident angle. This causes a phase difference in the received radio signal at each antenna.
Software is needed to process the radio signals from the antennas and calculate the incident angle. The radio signals are measured in terms of in-phase and quadrature components (IQ).
Processing the IQ signals isn’t easy because it requires taking account of the relative position of the antennas on the PCB, delays in switching between the antennas (there is only one radio receiver) and the use of complex-number arithmetic. The result is a power spectrum, the peak of which is the expected azimuth and elevation of the radio signal in two dimensions.
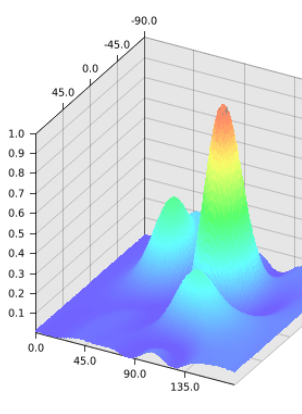
The finding of the peak also isn’t easy because it requires looping over lots of values to find the maximum. This is computationally time consuming especially as this has to be done many times per second for multiple locators.
Our LocationEngine™ is the first independent software to provide scalable IQ to location processing. It provides industry-leading accuracy, performance, security and reliability for Bluetooth® AoA direction finding. It’s currently compatible with the Minew AoA Kit but we are working with other manufacturers to support further hardware.
LocationEngine™ is designed in integrate into 3rd party systems to provide x, y, z and also area where locators cover more than one area. We supply PrecisionRTLS™ that uses this data to plot onto plans/maps, provide alerts and store historical data for later reporting.