Here are the top questions we get asked as a Bluetooth LE developer:
For apps, can the app work without Bluetooth and location on? No. There’s no special OS mechanism on iOS nor Android that uses Bluetooth LE without the user having Bluetooth and location on. Many users leave Bluetooth and location on to allow ease of use with cars and audio headphones. Location is also usually one due to use with maps.
How does leaving Bluetooth on affect battery life? Bluetooth is no longer drains the battery as was the case in the early days of smartphones. It can be left on with negligible extra battery use.
What’s the maximum range? The range depends most on the Bluetooth device to are connecting to. Most devices, running on battery, work 50m to 100m. Devices with larger batteries, running from mains or USB can work up hundreds of metres. We have a device that works up to 4000m.
What SDK should be used? Most, but not all, SDKs and 3rd party libraries tend to be poorly implemented/documented, tie your code into using a particular beacon and rarely get updated to use newer mobile platform APIs. We recommend software use the iOS and Android Bluetooth APIs directly to make your code independent of the beacon type and readily able to be updated when the mobile platforms themselves are updated.
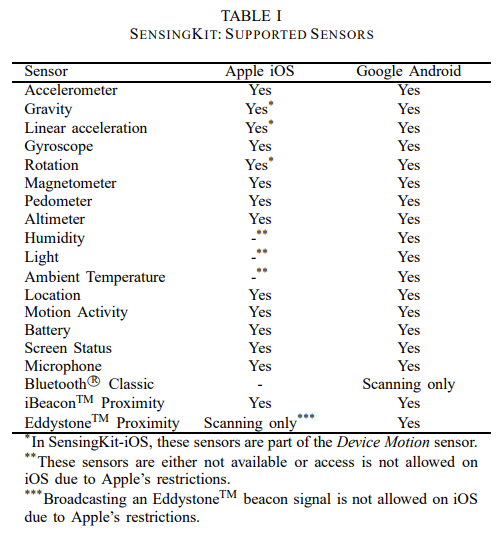
While the SensingKit supports beacons, it only supports them for detecting proximity. The various sensor beacon variants are not supported. SensingKit is best used when you want the smartphone, not the beacon, to do the sensing. It’s useful when you want to mix smartphone sensing with beacon proximity sensing.
Holt Village has launched a new iBeacon Trail that uses the free ‘Explore North East Wales’ app from the Apple and Google app stores. It is one of twelve communities in North East Wales for which a system has been developed to find out more about the community and locations.
The project has been funded by the LEADER scheme which is a fund for rural areas in Wales to explore innovative new approaches and experimental technologies to tackle poverty, create jobs and drive sustainable economic development.
Research took place in a school in the UK in June 2017 using a platform called Studywiz and the eLockers iOS app. It looked into the use of iBeacons to provide for enquiry-based learning, independent learning and individualisation.
The initial description of beacons is misleading:
“Beacons consist of a database inside a plastic casing (see Figure 2). They are ‘pas-sive’ (McDonald & Glover 2016, p. 3) pieces of technology that simply ‘push’ their content to any receptive device.”
This isn’t true. The content lies somewhere else, usually in an app or on a server.
The research found that beacons can be used to allow students to learn at their own pace while relieving teachers to provide move individual tuition. There were technical challenges with local network connectivity and closeness of beacons but these were eventually resolved.
Mr Beacon has a new video interview with Barry McGeough, who has worked with Dr. Martins, North Face and Speedo. He’s the founder and former head of innovation at PVH who work with brands such as Calvin Klein, Tommy Hilfiger and IZOD.
The interview covers the use of RFID, barcodes and beacons by brands. Brands are increasingly needing to directly connect with consumers to assure them that they are understood. Nevertheless, retailers still control the buying process and are usually the ones to mandate use of asset tracking technologies, usually, for stock control.
The video explains how any retailer or brand using asset tracking technologies needs to make it easy and seamless. Financially, the per-unit cost of the tracking technology is especially important for lower cost commodity items such as underwear.
QR codes are ubiquitous in China and it’s expected some of the techniques will make their way to Western markets. RFID has been successful in retail where it has allowed, for example, stock tracking without having to open boxes.
Latest innovations include ‘smart mirrors’ in changing rooms that can be interacted with to request an item in a different size or find matching items. There are also usecases around checkout, security, anti-counterfeit solutions and end-of-life when it’s required to know the material makeup of an item. Tagging and apps extends the buying process to outside the store to places such as the consumers closet/wardrobe.
The conclusion is not to use technology for technology’s sake and instead invent scenarios that are easy, fun and make use of social interaction.
The UK Defence and Security Accelerator (DASA) held a competition to find ideas to reduce the threat of terrorists in public spaces. KSharp created CriB, Crowd Resilience through iBeacons, a system using iBeacons to allow people to report terrorist threats and receive security alerts through an app. This allows venues such as city centres, shopping centres and sports stadiums to improve safety and security. A video has recently become available:
Nordic, the manufacturer of the System on a Chip (SoC) found in most beacons has announced that an ultra thin version will be available from American Semiconductor.
The AS_NRF51 Flex-BLE (pdf) is an ultra-thin version of Nordic’s nRF51822 SoC wafer-level CSP (WL-CSP), employing American Semiconductor’s ‘FleX™ Semiconductor-on-Polymer™’ (FleX SoP) process to reduce package size to approximately 35µm—roughly half the thickness of a human hair.
The largest component of beacons and Bluetooth sensors is usually the battery rather than the SoC. However, the Flex-BLE version will be especially suited to energy harvested and solar solutions where it will be possible to create very thin beacons that can be invisibly manufactured into products or their packaging.
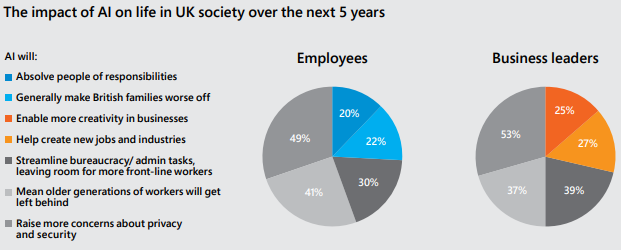
The message is that organisations should embrace AI’s potential or risk being left behind. As well as economic gains, changes should take into account social and safety issues.
“Organisations that are investing in establishing the right approach to AI now outperform those that don’t by 9%”
The paper explains AI and how many organisation are talking about AI but fewer are taking action. It gives perspectives of use of AI in FinTech, Healthcare, Manufacturing and Retail.
The traditional IoT strategy of sending all data up to the cloud for analysis doesn’t work well for some sensing scenarios. The combination of lots of sensors and/or frequent updates leads to lots of data being sent to the server, sometimes needlessly. The server and onward systems usually only need to now about abnormal situations. The data burden manifests itself as lots of traffic, lots of stored data, lots of complex processing and significant, unnecessary costs.
The processing of data and creating of ongoing alerts by a server can also imply longer delays that can be too long or unreliable for some time-critical scenarios. The opposite, doing all or the majority of processing near the sensing is called ‘Edge’ computing. Some people think that edge computing might one day become more normal as it’s realised that the cloud paradigm doesn’t scale technically or financially. We have been working with edge devices for a while now and can now formally announce a new edge device with some unique features.
Another problem with IoT is every scenario is different, with different inputs and outputs. Most organisations start by looking for a packaged, ready-made solution to their IoT problem that usually doesn’t exist. They tend to end up creating a custom coded solution. Instead, with SensorCognition™ we use pre-created modules that we ‘wire’ together, using data, to create your solution. We configure rather than code. This speeds up solution creation, providing greater adaptability to requirements changes and ultimately allows us to spend more time on your solution and less time solving programming problems.
However, the main reason for creating SensorCognition™ has been to provide for easier machine learning of sensor data. Machine learning is a two stage process. First data is collected, cleaned and fed into the ‘learning’ stage to create models. Crudely speaking, these models represent patterns that have been detected in the data to DETECT, CLASSIFY, PREDICT. During the production or ‘inference’ stage, new data is fed through the models to gain real-time insights. It’s important to clean the new data in exactly the same way as was done with the learning stage otherwise the models don’t work. The traditional method of data scientists manually cleaning data prior to creating models isn’t easily transferable to using those same models in production. SensorCognition™ provides a way of collecting sensor data for learning and inference with a common way of cleaning it, all without using a cloud server.
Sensor data and machine learning isn’t much use unless your solution can communicate with the outside world. SensorCognition™ modules allow us to combine inputs such as MQTT, HTTP, WebSocket, TCP, UDP, Twitter, email, files and RSS. SensorCognition™ can also have a web user interface, accessible on the same local network, with buttons, charts, colour pickers, date pickers, dropdowns, forms, gauges, notifications, sliders, switches, labels (text), play audio or text to speech and use arbitrary HTML/Javascript to view data from other places. SensorCognition™ processes the above inputs and provides output to files, MQTT, HTTP(S), Websocket, TCP, UDP, Email, Twitter, FTP, Slack, Kafka. It can also run external processes and Javascript if needed.
With SensorCognition™ we have created a general purpose device that can process sensor data using machine learning to provide for business-changing Internet of Things (IoT) and ‘Industry 4.0’ machine learning applications. This technology is available as a component of BeaconZone Solutions.
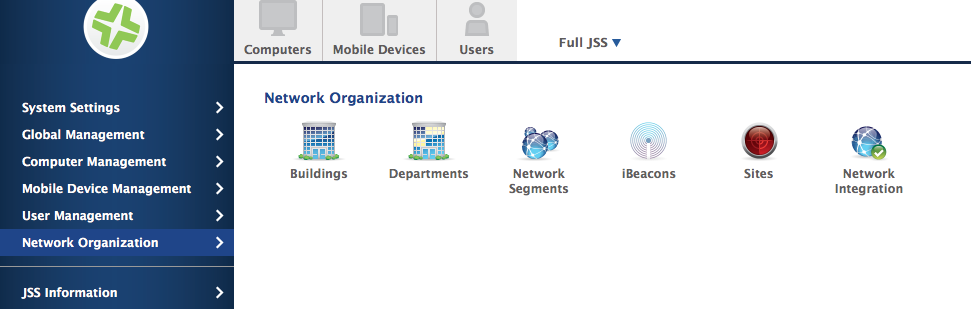
Jamf School is a device management solution for education. It allows you to track devices and see their status. It uses iBeacon to allow subject learning material to be unlocked when students enter specific areas.
The Jamf web site has some useful content on using iBeacons in education:
Invisible Candles: Exploring IT Applications of iBeacons with Your JSS Paul Cowan—IT Manager at the University of Waikato explains iBeacons, how they have evolved, how museums are using iBeacons to share information with visitors and how the Casper Suite can be used trigger events and gather proximity data.
iBeacons in Education Video webinar on proximity-based technology and how it can be used to distribute and manage technologies in education environments. Covers privacy considerations, casper suite and jamf.