There’s new research into a home people tracking system to detect people who are isolated at home. The context is home isolation due to Covid but this could equally be used for people with limited mobility who need to stay indoors.
The idea is to use Bluetooth rather than visual, camera-based monitoring. Smart bracelets are used that can also monitor position, blood oxygen and heart rate.
The system can also send early warning signals to organisations or relatives through instant messaging software.
The system is implemented using ESP32 single board computers and a Raspberry Pi for data collection.
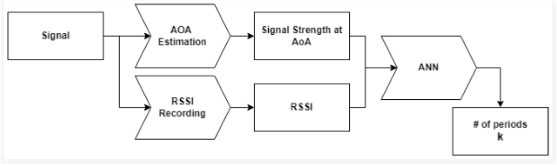
Machine learning was used to determine the line-of-sight distance in a multipath (reflective) environment. Due to the multipath effect, acquired signals indoors have complex mathematical models. A machine learning Artificial Neural Networks (ANN) is the most efficient way to process these signals.
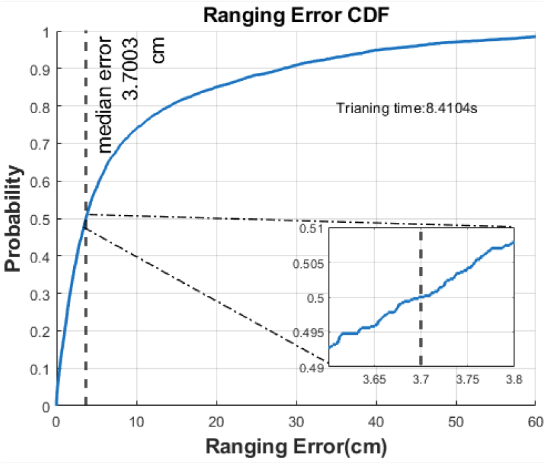
The system achieved accuracy where 75% of the errors were less than 0.1 m with a median error of 0.037 m and a mean error of 0.092 m. This reduced ranging errors to under 10cm. The researchers were able to achieve high-precision indoor ranging without the need for a wide signal bandwidth nor synchronisation. The system was also simple and low cost to deploy due to low complexity of the equipment.
Since we have been selling the AKMW-iB003N-SHT and AKMW-iB004N PLUS SHT we have been getting a few questions regarding accessing the temperature and humidity data.
You should first read the manufacturer’s SHT20 User Guide (username and password supplied with your beacon).
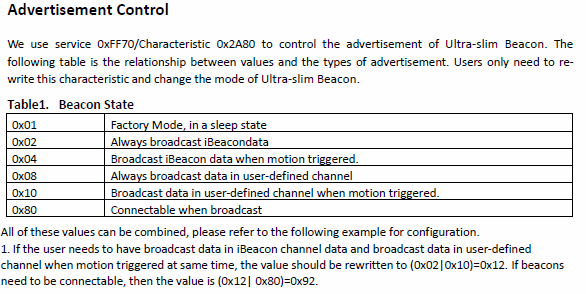
If you are connecting via GATT to read the sensor data then you will need to set the beacon to be always connectable. The way to do this is (for some strange reason) only shown in the iB001M user guide:
So if you wish to transmit iBeacon and remain connectable, set the value to 0x82. Note that if you subsequently set the beacon ‘on’ or ‘off’ in the ‘simple’ configuration screen, accessed via the spanner icon (Android) or Configure option (on iOS), then this will overwrite your set value.
However, you might instead consider reading the sensor data from the advertising data which a) is much easier to program and b) uses much less beacon battery power and c) allows multiple apps to see the data at the same time.
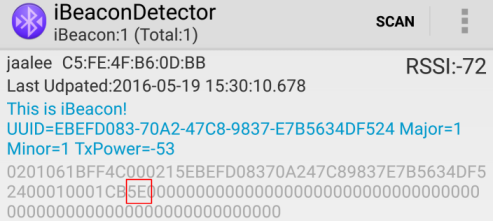
One of the great things about AnkhMaway beacons is that they provide the battery level in the advertising data. This allows you to view or easily programmatically determine the battery level without connecting. For example, here’s the output from the Android iBeaconDetector app:
The last two useful hex characters of the advertising data, ‘5E’ in this case, gives the level out of 100. You can use an online Hex to decimal converter to see the value in decimal that’s 94% in this case.
Note that the battery level in the advertising data is only present for recent firmware versions which might not be the case if you haven’t purchased the beacons from BeaconZone.
We are seeing beacons increasingly being used in immersive experiences in theatre productions, events, museums, galleries, theme parks and with augmented reality (AR). Beacons provide physical location cues for tech-driven immersive experiences.
Beacons have a variety of uses in immersive experiences. They cause things to happen based on the location of a person or things or their mutual proximity. They provide a way of counting how many people or things are in an area. Some beacons have buttons that allow for human interaction. There are also sensor beacons that expand what’s possible through the detection of temperature, light, proximity, physical open/closed, movement and fall detection. Beacons replace what might usually have been done manually thus saving costs, sometimes implementing scenarios that are impractical to do manually. While the emphasis is usually all about maximising the experience, beacons also allow the collection of data so that it’s possible to learn from current or past installations.
Beacons are small, battery powered devices that can last months to years without changing the battery. They are detected by smartphones, gateways or single board computers such as Raspberry Pi.
Wearable BeaconWiFi gateway
We have immersive experience clients such as dreamthinkspeak, Playlines, Punchdrunk, Sophie Jump using our beacons. We also provide consultancy an example of which is Royal Museums Greenwich’s AR immersive experience for which we have a case study.
Cutty Sark
Beacons help make immersive experiences more physical and magical.
Circuit Digest has a new tutorial ESP32 based Bluetooth iBeacon. ESP32 is a small single board computer that can easily be programmed to do different tasks. Many ESP32 boards include Bluetooth so it’s possible to program them to be an iBeacon.
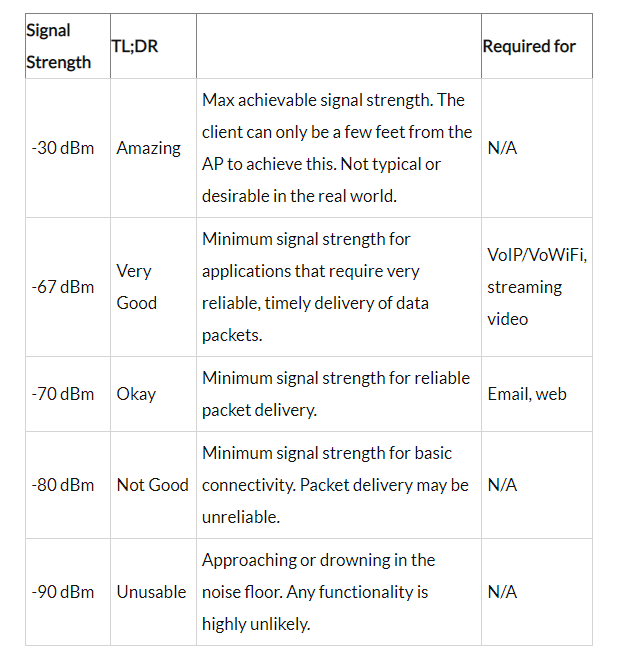
The article first explains how to detect beacons on Android using nRF Connect. This is similar to our post Testing if a Beacon is Working. There’s also a useful table that explains the different ranges for received signal strength (RSSI):
Creating your own beacons means you can customise the advertising and do other IoT-related things at the same. The downside is bare ESP32 boards aren’t as physically robust, easy to configure nor power friendly as a dedicated beacon.
Faraday bags can be very useful during development when you want to bring beacons in and out of range or need to hide development beacons. They are also useful during setup when you want to shield uncommissioned beacons temporarily.
These bags were originally designed for military, intelligence and police agencies to prevent seized devices from being remotely altered. They shield WiFi, Bluetooth and phone signals up to 70dBm. They can also be used with phones and tablets for personal anti-radiation health reasons, preventing tracking or avoiding communication when you don’t want to be interrupted.
The smallest gap in a Faraday bag can cause radio leakage. Hence, the top has velcro to allow it to be rolled over and securely fastened for full radio blocking.
Bluetooth beacons have evolved considerably over the last twelve years. Occasionally, we see Twitter comments such as ‘Remember iBeacon’ or ‘Beacons are dead’. Beacons aren’t dead. They are used in many situations and have, in some cases, evolved such that you don’t even know they are being used.
Bluetooth 4.0 devices started with the Bluetooth 4.0 specification in December 2010. The iPhone 4S and many Android devices were the first iOS device to use this new wireless protocol. Interoperability with smartphones is one the main reasons Bluetooth LE and beacons have become so popular.
While there were a few early, custom, Bluetooth LE devices that just advertised, the popularity of beacons was boosted by the announcement of the iBeacon protocol at the Apple Worldwide Developers Conference in 2013.
The First iBeacons
The iBeacon protocol actually didn’t add that much because it just used the standard Bluetooth 4.0 protocol with the data being interpreted in a particular way to uniquely identify the beacon. The important part was that iPhones would have CoreLocation APIs to detect these kinds of Bluetooth 4.0 devices.
Apple’s example usecases were mainly marketing, retail and consumer driven and this led to lots of startups creating new iBeacon platforms often with re-badged iBeacons with locked-in Software as a Service.
Google didn’t want to loose out but and their ambitions were wider in that they wanted to create what they called a Physical Web where smartphones could find and control devices using Bluetooth. The Eddystone profile was released by Google in July 2015 which, again, was a thin layer on top of the standard Bluetooth 4.0 protocol. Again, the important part was the software, provided by Google, that allowed Eddystone to trigger events in the Android Chrome and Android itself via the Play Services component.
A key part of Eddystone was Eddystone-URL that allowed the advertising of a shortened web address. However, the triggering mechanism was totally controlled by a Google server that had it’s own opaque rules and was frustrating because it didn’t always work.
Many more startups adapted their software and hardware designs to use Eddystone-URL. However, the spammy side of the marketing community took hold and by 25 October 2018, Google discontinued support for Android Bluetooth Nearby Notifications. This caused the end of a large number of startups based on beacon marketing.
During the ‘Eddystone age’ of 2015-2018 something longer lasting was happening. Some manufacturers adapted their beacons to become sensors for things like movement, temperature, humidity, air pressure, light, on/off, proximity, fall detection, smoke, natural gas and water leak. At the same time, manufacturers created gateways that sensed beacons and were able to send the Bluetooth advertising to a server via WiFi or Ethernet. Beacons started being used in industry for real time locating (RTLS) and IoT.
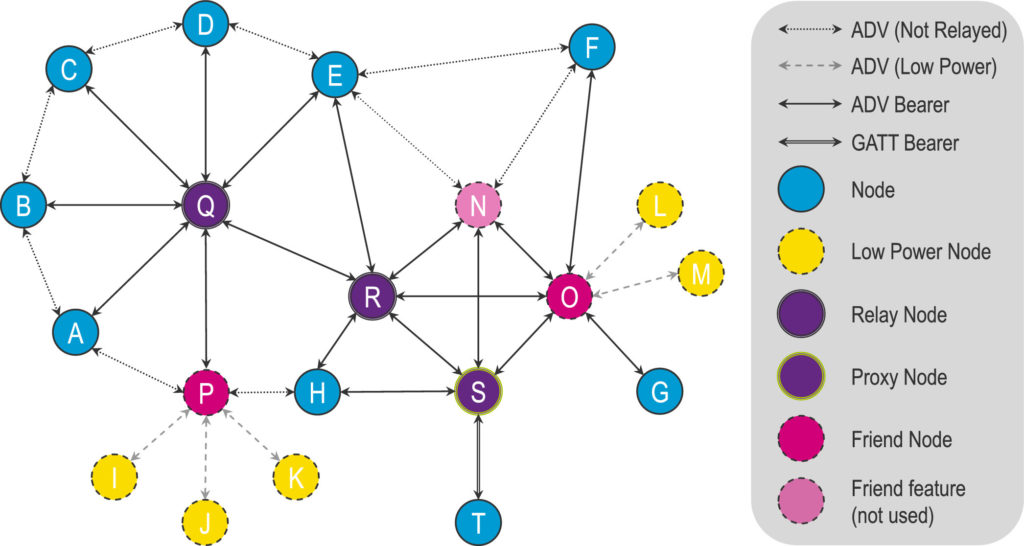
Bluetooth Mesh was adopted by the Bluetooth SIG in July 2017. This allowed beacons, or indeed any Bluetooth devices, to talk to each other such that a very large area can be covered with only one gateway at the edge. It’s now five years later and, apart from a few products related to lighting, Bluetooth Mesh hasn’t been popular.
Bluetooth Mesh
The main problem is that the Bluetooth Mesh standard was, for some reason, designed for usecases such as lighting that are low latency, low throughput and are mains powered. Bluetooth Mesh in beacons uses significant battery power and the throughput is too small for most IoT mesh applications having larger numbers of sensors.
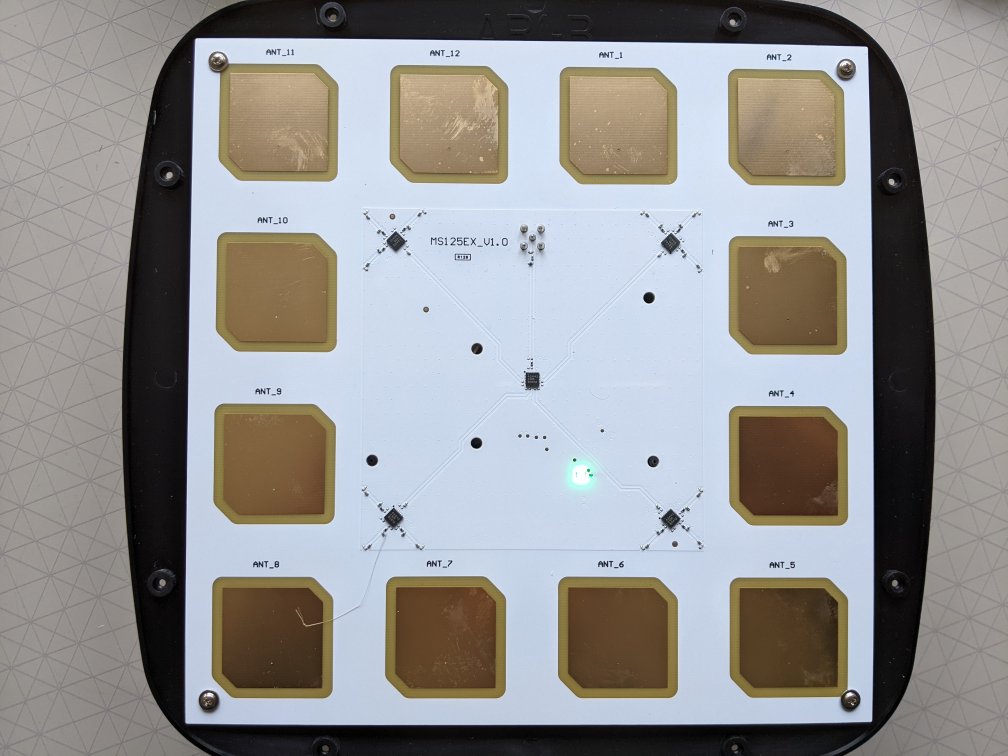
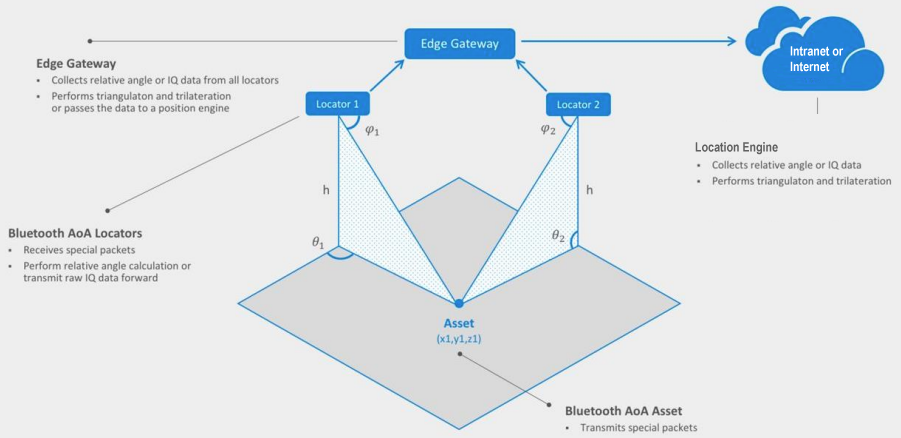
Bluetooth Direction Finding was introduced with Bluetooth 5.1 in January 2019. The Angle of Arrival (AoA) variant works by having a beacon send out special advertising that is picked up by a multi-antenna locator.
Locator with multiple antennas
It’s now two and half years since the Bluetooth 5.1 release and some products have come to the market. However, most are evaluation boards that are not suitable for use in production. The software required to analyse the AoA radio data is very complex and performance-critical which has held back quick adoption.
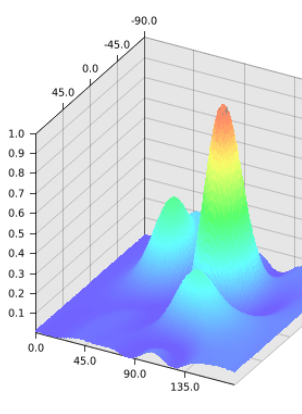
LocationEngine™ Spectrum Analysis
Today, beacons are used in a vary large number of situations. For example, our customers use beacons for warehouse pallet tracking, factory job tracking, train company asset tracking, locating 2-way radios, healthcare asset tracking, tracking the elderly patients, man down SOS, lone working, evidence-based policing, smart offices, location-based gaming, car driving logging, facilities maintenance tracking, cargo temperature monitoring, student attendance monitoring and general IoT sensing. There are also a few consumer-facing uses but these tend to aid rather than spam consumers. Examples include restaurant table locating, museums and galleries.
In the future we expect we might see AoA and it’s sister technology Angle of Departure (AoD) mature. We are seeing beacons being used more in AR and immersive experiences so they might even have application in metaverses to help bridge the physical and virtual. It’s difficult to say how inflation and recession will affect innovation using Bluetooth. On the one hand companies will be spending less but on the other companies are seeking ways to measure and automate to save costs as part of Industry 4.0. Whatever happens, expect to continue to see beacons being used as part of larger solutions rather than the original premise of them being a (marketing) solution.
We have had many enquiries from ISVs regarding the possibility of using AoA in the cloud. The idea is to use a location engine instance to allow their multiple customers to access AoA direction finding as a service.
Bluetooth AoA Direction finding works by having multiple locators that communicate with an on-site gateway that connects to the location engine. This is radio data so there’s lots of information sent very often. For large sites, there are multiple edge gateways. In most systems with more than a few assets, the gateway throughput becomes limited by the gateway hardware and the location engine processing input is limited mainly by the CPU capability.
The location engine has to do a lot of work. It implements computationally intensive radiogoniometry and anti-interference algorithms using data from multiple gateways.
In most cases, with large numbers of assets, the gateways and location engine are working near full capacity with the latency of the whole system being balanced against the number of assets.
While such a system can work in the cloud, the bandwidth and latency of the connection to the cloud means that it usually isn’t technically and financially viable. Sharing such a system across customers is even less viable. Instead, standalone systems have to be set up on-site to provide optimum performance.
Be aware that some ‘toy’ evaluation, as opposed to production, AoA systems perform the radiogoniometry and anti-interference algorithms at the gateway. While might work for a few assets, the gateway usually doesn’t have the processing power to scale to a production environment. Also, the gateway is only processing the radiogoniometry and anti-interference algorithms using data it has seen. Production grade radiogoniometry and anti-interference algorithms need to consider data from multiple gateways.
As we have previously mentioned, we believe too many companies chase the beacon retail marketing bandwagon when there are more compelling uses for beacons. These other uses also often have much less commercial competition. Think outside the current common usecases. Instead, invent new uses that better match organisations’ goals.
One such example is mentioned in the article Can Big Data Make for Better Exhibitions? Unlike the run of the mill, “let’s tag items and show information on them”, The Art Institute of Chicago used beacons to create heat maps, travel paths and derive dwell times to determine which parts of the museum people really want to see. The museum uses beacons for analytics. Promoting popular parts of the museum brought them an uplift in paid attendance from $14.8 million to $19.9 million. This success is based on concentrating on the museum’s real need of more income.
Start with your needs rather than the technology. Think in terms of your current challenges and work out how IT, in general, might be used to quantify the problem. Analytics will help you narrow in on specific areas that, in turn, can be improved and hence better achieve the organisation’s goals.