Every now and then, we come across a product that’s a bit different. In this case it’s a very small and reasonably priced gateway, the MG3.

It is designed to gather advertising data from iBeacon, Eddystone and other devices. It sends this data to your server in JSON format using either HTTP(S) or MQTT protocols. The device connected to a 2.4GHz WiFi. To indicate its status, there is an RGB LED integrated into its design.
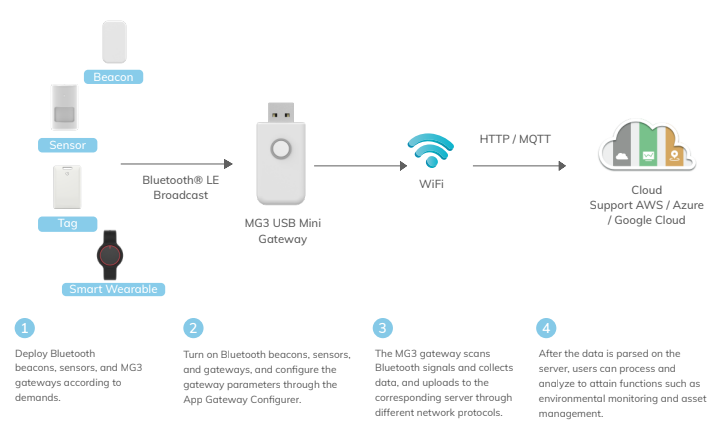
While the marketing materials mention detecting Minew beacons, it can detect any kind of beacon and, more generally, any Bluetooth device that is advertising. It has the capability to process data from up to 70 devices per second. Although its optimal range is 70 meters in an open space, this range is dependent on the power of the beacons being detected.
The device conveniently uses a standard USB connection for power. It consumes approximately 340mA of power, which decreases to 290mA if the LEDs are turned off.
To change the device settings you use a smartphone app. Please note that currently, the app is only available for Android devices. The settings you can configure include the method of data upload (HTTP(S) or MQTT), server URL, upload interval, RSSI filter, MAC address filter (using Regular Expression), raw Bluetooth filter (using Regular Expression), and time zone settings.